Nexelia Academy · Official Revision Notes
Complete A-Level revision notes · 9 chapters
This chapter introduces the fundamental concepts of motion in a straight line, differentiating between scalar and vector quantities. It explains how to represent motion using various graphs and how to calculate key quantities like speed, velocity, and acceleration.
scalar — A quantity which has only size, or magnitude.
Scalar quantities are fully described by a numerical value and a unit. Examples include distance, speed, mass, and time. They do not have an associated direction in space, much like the temperature outside is just a number like 20°C without a direction.
vector — A quantity which has both magnitude and a direction in space.
Vector quantities require both a numerical value (magnitude) and a specified direction to be fully described. Examples include displacement, velocity, and acceleration. The direction is crucial for understanding the physical situation, similar to how giving directions requires specifying 'walk 5 km north' instead of just 'walk 5 km'.
Students often confuse scalar and vector quantities, particularly distance/displacement and speed/velocity. Remember that scalar quantities have magnitude only, while vector quantities have both magnitude and direction.
origin — A fixed reference point from which position is measured.
The origin serves as the zero point on a coordinate system. All positions are defined relative to this point. The choice of origin is arbitrary but must be consistent throughout a problem, much like the '0' mark on a ruler is the origin for all other measurements.
Students often think the origin must be the starting point of motion, but actually it can be any fixed point chosen for convenience.
positive direction — The chosen direction in which quantities like position, displacement, and velocity are considered positive.
Establishing a positive direction is crucial for consistently representing vector quantities with signs. For vertical motion, 'upwards' or 'downwards' can be chosen as positive. For horizontal motion, 'east' or 'right' are common choices, similar to deciding which way is positive on a number line.
Always clearly state your chosen origin and positive direction at the beginning of a problem to avoid ambiguity and ensure correct interpretation of signs for position, displacement, and velocity.
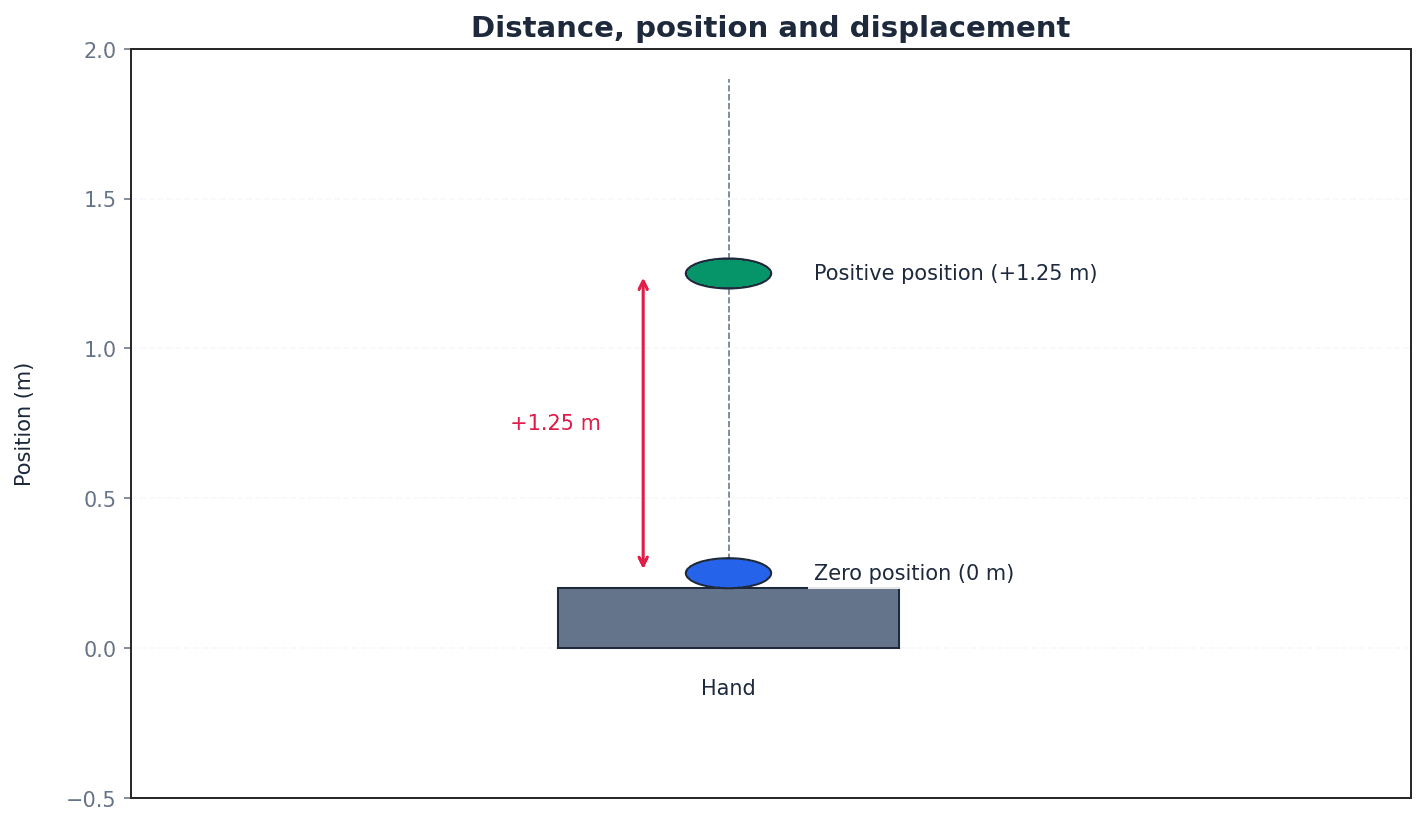
position — The distance of an object above a fixed origin, including its direction.
Position is a vector quantity that specifies an object's location relative to a chosen reference point, called the origin. It includes both magnitude (how far) and direction (where relative to the origin), like a house number on a street tells you where the house is relative to the start of the street.
negative position — A position that is in the opposite direction to the defined positive direction, relative to the origin.
If 'upwards' is positive, then a negative position means the object is below the origin. If 'east' is positive, a negative position means the object is west of the origin. It indicates location relative to the origin and the chosen positive direction. For example, if your house is '0' and 'east' is positive, a friend's house at '-50m' is 50m to the west of your house.
Students often think negative position means the object is moving backwards, but actually it just indicates its location relative to the origin and positive direction; the object could still be moving in the positive direction towards the origin.
distance — The total path length travelled by an object, irrespective of its direction.
Distance is a scalar quantity, meaning it only has magnitude. It measures how much ground an object has covered during its motion. It is always positive or zero. If you walk around a block and return to your starting point, your distance travelled is the perimeter of the block, not zero.
displacement — The change in position of an object, measured from any position.
Displacement is a vector quantity that describes the straight-line distance and direction from an object's initial position to its final position. It can be positive, negative, or zero. Unlike position, it doesn't require a fixed origin. For instance, if you walk 5m east and then 5m west, your total distance is 10m, but your displacement is 0m because you returned to your starting point.
Students often think distance and displacement are interchangeable, but actually distance is the total path length (scalar) while displacement is the change in position (vector).
speed — A scalar quantity that describes how fast an object is moving, without regard to direction.
Speed is the magnitude of velocity. It is calculated as the total distance travelled divided by the total time taken. Speed is always positive or zero. Your car's speedometer shows your speed, not your velocity, because it doesn't tell you which direction you're going.
velocity — A vector quantity that describes the rate at which the position of an object changes, including its direction.
Velocity is the rate of change of position. Its magnitude is the speed, but it also has a direction. A negative velocity indicates movement in the negative direction. A GPS tells you your velocity because it shows both how fast you're going and in what direction.
Students often think speed and velocity are the same, but actually speed is a scalar (magnitude only) while velocity is a vector (magnitude and direction).
Average speed
Used to calculate the overall speed over a journey, irrespective of direction changes. It is a scalar quantity.
Average velocity
Used to calculate the overall velocity over a journey, considering the net change in position. It is a vector quantity.
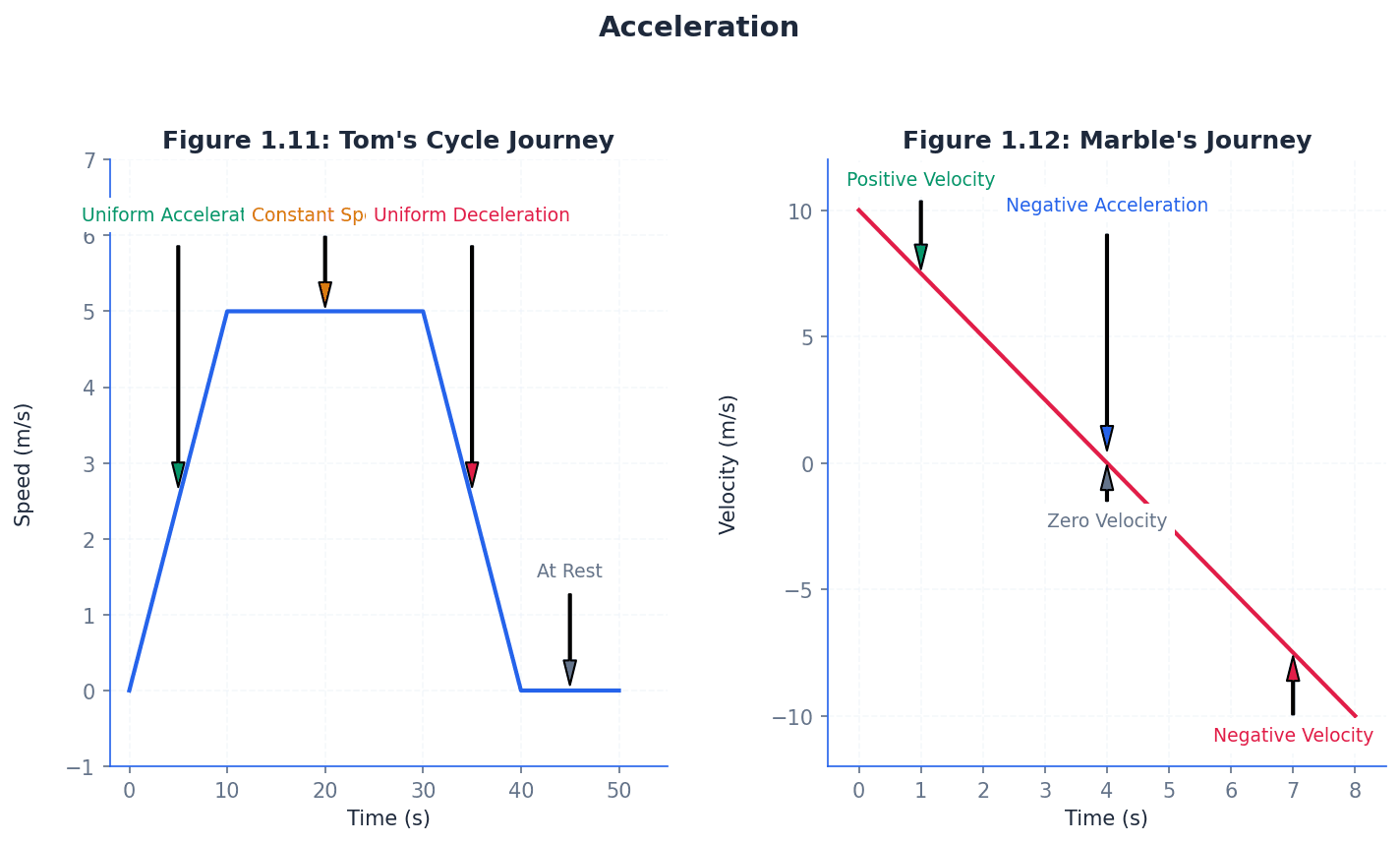
acceleration — A vector quantity that describes the rate at which the velocity of an object changes.
Acceleration occurs whenever there is a change in velocity, whether an object is speeding up, slowing down, or changing direction. It is represented by the gradient of a velocity-time graph and can be positive or negative. When you press the accelerator pedal in a car, you're changing its velocity, which is acceleration. Pressing the brake pedal also causes acceleration (deceleration).
Average acceleration
Used to calculate the overall rate of change of velocity over a period of time. It is a vector quantity.
Students often think acceleration only means speeding up, but actually it means any change in velocity, including slowing down (negative acceleration) or changing direction.
Students may think that negative velocity always means slowing down, but it only indicates movement in the negative direction.
Motion in a straight line can be effectively represented using various graphs. Position-time graphs show an object's location over time, while distance-time graphs illustrate the total path length covered. Speed-time and velocity-time graphs are crucial for understanding how an object's speed or velocity changes over time, allowing for the calculation of other quantities.
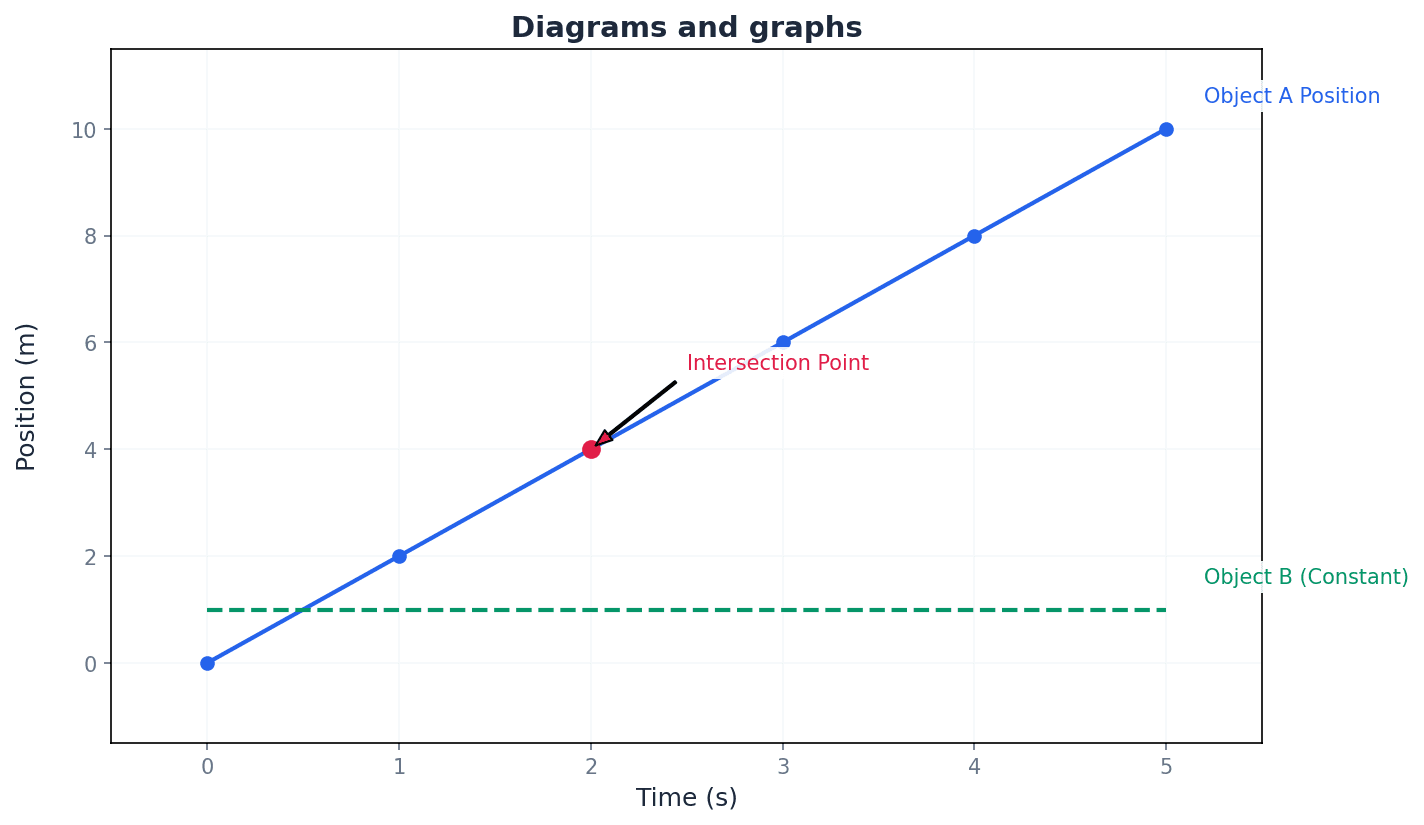
The gradient of a position-time graph represents velocity, while the gradient of a velocity-time graph represents acceleration. The area under a speed-time graph gives the total distance travelled. Crucially, the area under a velocity-time graph represents the displacement, taking into account the direction of motion.
Area of a rectangle (under speed-time graph)
Represents the distance travelled when speed is constant.
Area of a trapezium (under speed-time graph)
Represents the distance travelled when speed changes uniformly.
Area of a triangle (under speed-time graph)
Represents the distance travelled when speed increases uniformly from rest.
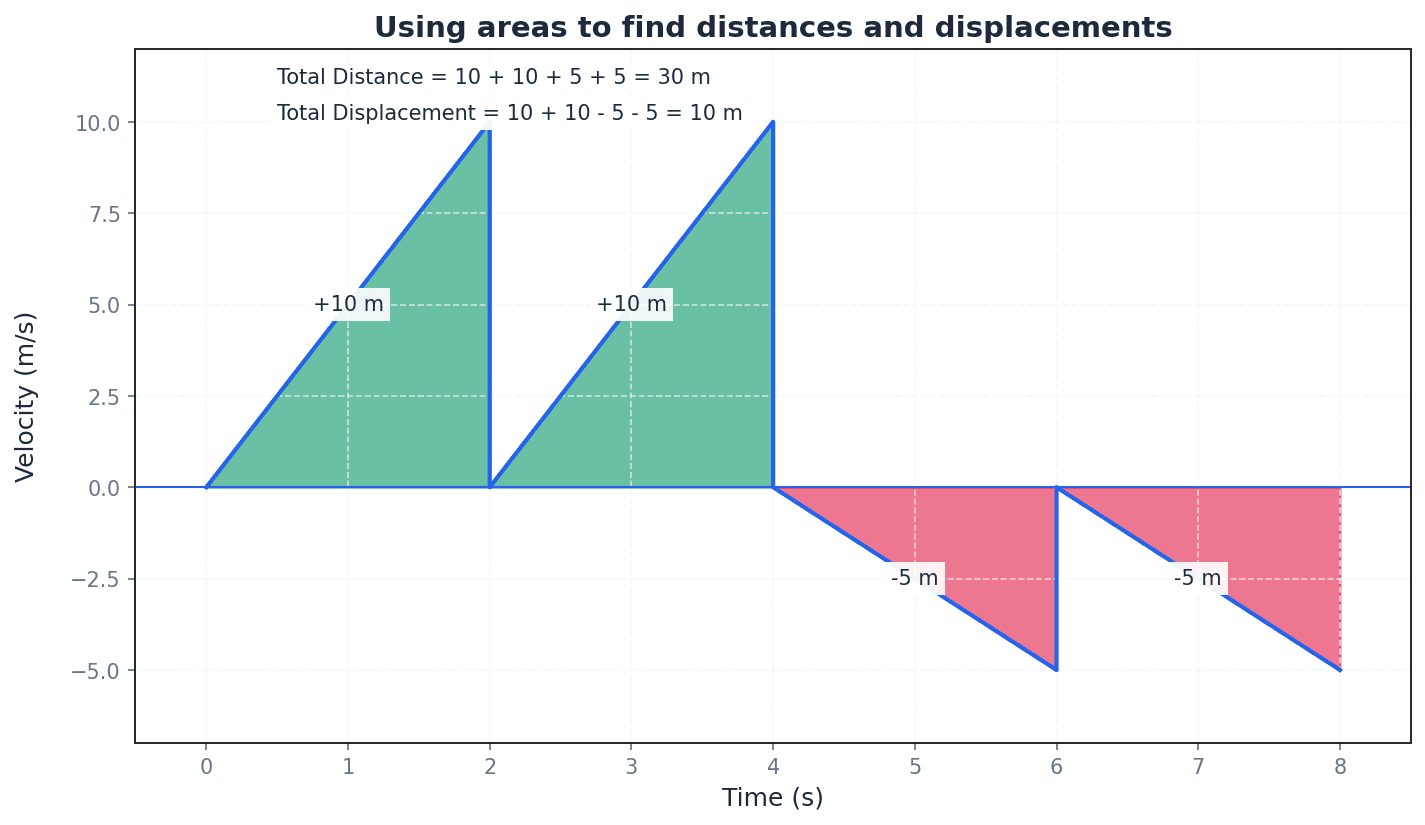
Students may incorrectly interpret the area under a velocity-time graph as total distance instead of displacement, especially when velocity is negative. Remember to add the absolute values of all areas for total distance.
When calculating vector quantities like displacement or velocity, always include the direction (e.g., +5 m, -10 m/s, 5 m/s upwards) or indicate it with a sign if a positive direction has been defined.
Sketch a velocity-time graph whenever possible. It helps visualize the motion and allows you to find acceleration (gradient) and displacement (area) easily.
Read the question carefully. If it asks for 'velocity', your answer needs a sign or direction. If it asks for 'speed', it's just the magnitude.
For multi-stage journeys, remember that average speed is the *total* distance divided by the *total* time, not the average of the speeds.
Exam Technique
Calculating total distance from a speed-time graph
Calculating displacement from a velocity-time graph
| Mistake | Fix |
|---|---|
| Confusing distance with displacement, and speed with velocity. | Remember that distance and speed are scalar (magnitude only), while displacement and velocity are vector (magnitude and direction). Displacement is the net change in position, not the total path length. |
| Thinking negative velocity always means slowing down. | Negative velocity simply indicates movement in the chosen negative direction. An object can have negative velocity and still be speeding up (if acceleration is also negative). |
| Believing acceleration only means speeding up. | Acceleration is any change in velocity, including slowing down (deceleration, which is negative acceleration in the positive direction) or changing direction. |
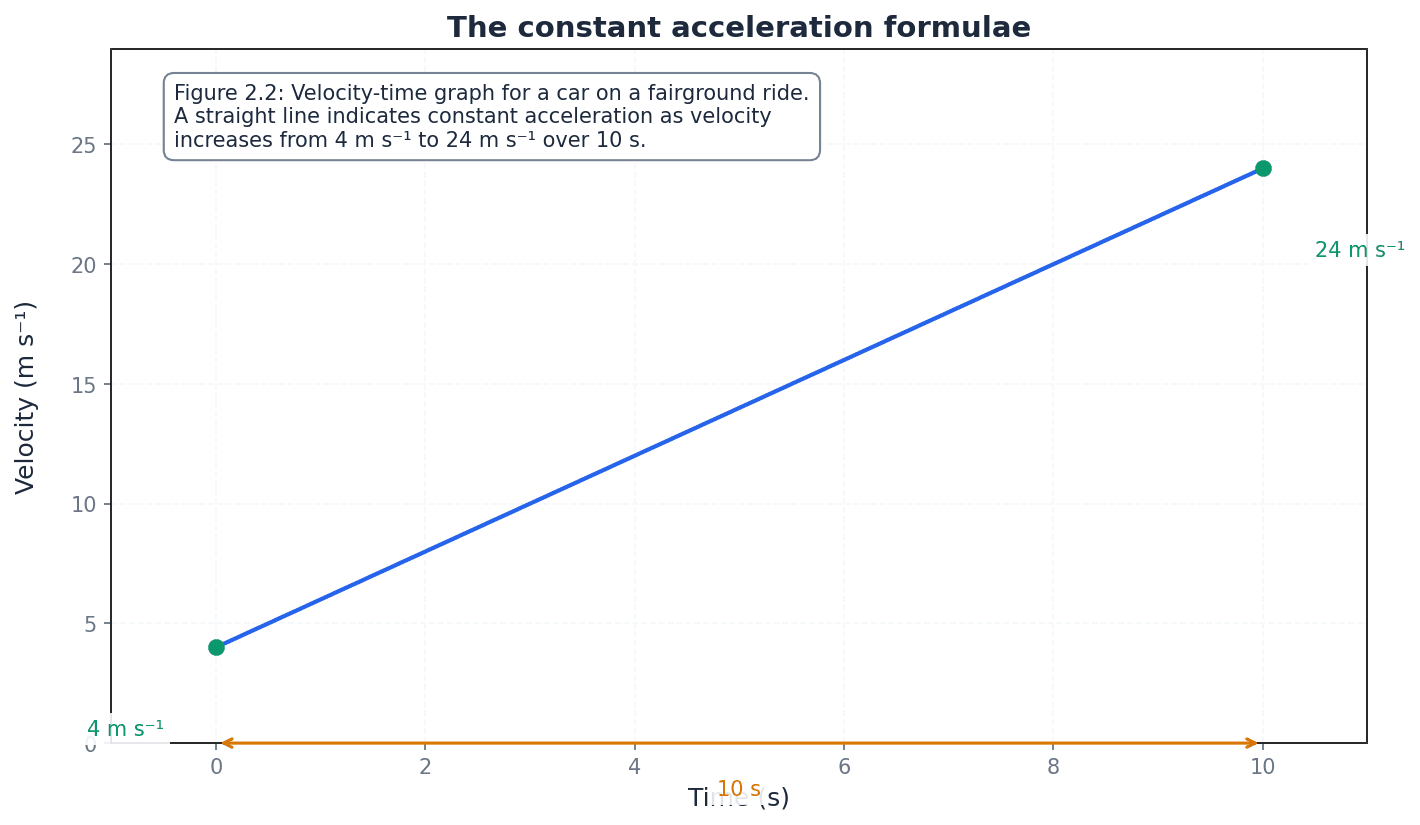
This chapter introduces the constant acceleration formulae, also known as suvat equations, which are essential for modelling motion where acceleration is constant. It covers the derivation of these five key equations and demonstrates their application in various scenarios, including vertical motion under gravity. The importance of making simplifying assumptions, defining variables, ensuring consistent units, and checking the sensibility of answers in mathematical modelling is also highlighted.
particle — A particle is an idea used to model an object that has no dimensions.
When modelling motion, complex objects like cars can be simplified to particles, ignoring their size and internal motion. This simplification allows for easier mathematical analysis of their overall movement. Imagine a tiny dot on a map representing a whole city; the dot has no size, but it marks the city's location for travel planning.
Students often misinterpret the meaning of 'particle' as a very small object rather than a theoretical point mass with no dimensions, used for simplifying models.
When asked to state assumptions in a modelling problem, 'treating the object as a particle' is a common and valid assumption to mention.
simplifying assumptions — Simplifying assumptions are decisions made when setting up a mathematical model to decide what is essential and what can be ignored.
This process is the first stage of mathematical modelling, allowing complex real-world situations to be represented by manageable equations. Examples include ignoring car dimensions or treating a road as a straight line. When drawing a sketch map to give directions, you simplify by only showing major roads and landmarks, ignoring minor details like individual houses or small bends.
Students often think simplifying assumptions make the model less accurate and therefore bad, but actually they are crucial for making complex problems solvable and providing a useful first approximation.
Always state your simplifying assumptions clearly in problem-solving, as they often form part of the mark scheme for modelling questions.
variables — Variables are quantities defined with suitable units that depend on the problem being solved in a mathematical model.
These quantities, such as time (t), distance (x), or speed (v), are used to set up equations that describe the motion. Proper definition and consistent units are essential for accurate calculations. In a recipe, variables are like the amounts of ingredients (e.g., '2 cups of flour' or '1 teaspoon of salt'), which change depending on how many servings you want to make.
Students often think variables are just letters, but actually they represent measurable physical quantities with specific units.
Ensure all variables in your calculations have consistent units; mixing units (e.g., km/h and m/s) is a common error that leads to incorrect answers.
displacement — Displacement (s) is the change in position of an object from its starting point.
It is a vector quantity, meaning it has both magnitude and direction. Unlike distance, if an object returns to its starting point, its displacement is zero. If you walk 5 meters forward and then 5 meters backward, your distance travelled is 10 meters, but your displacement is 0 meters because you ended up where you started.
Students often think displacement is the same as distance travelled, but actually displacement is the straight-line distance and direction from the start to the end point, while distance is the total path length.
velocity — Velocity (v or u) is the rate of change of displacement, indicating both speed and direction.
Initial velocity is denoted by 'u' and final velocity by 'v'. It is a vector quantity, and its sign indicates the direction of motion relative to a chosen positive direction. Speed tells you how fast you're going (e.g., 60 km/h), while velocity tells you how fast and in what direction (e.g., 60 km/h North).
Students often think velocity and speed are interchangeable, but actually velocity is a vector (includes direction) while speed is a scalar (magnitude only).
time — Time (t) is the duration over which motion occurs.
In the suvat equations, 't' represents the elapsed time from the start of the motion being considered. It is a scalar quantity and is always positive. Time is like the ticking clock that measures how long an event lasts, from start to finish.
Students often think time can be negative in some contexts, but actually in kinematics problems, 't' always refers to a positive duration.
constant acceleration — Constant acceleration occurs when the velocity of an object changes at a constant rate, meaning the gradient of its velocity-time graph is a straight line.
This is a fundamental assumption for using the suvat formulae. While rarely perfectly constant in real-world situations for long periods, it serves as a useful first approximation over short times. Imagine a car with its accelerator pedal held down exactly halfway; its speed increases steadily, not in jerks or sudden bursts.
Students often think constant acceleration means constant speed, but actually it means the rate of change of speed (or velocity) is constant.
The suvat formulae are only applicable when acceleration is constant; explicitly state this assumption if you use them in a modelling question.
suvat equations — The suvat equations are a set of formulae used to solve problems when an object is assumed to be moving with constant acceleration.
These five equations relate displacement (s), initial velocity (u), final velocity (v), acceleration (a), and time (t). Each formula omits one variable, making them versatile for different problem types. Think of them as a toolkit for motion problems; you pick the right tool (formula) based on what you know and what you want to find.
Students often think they can use suvat equations for any motion, but actually they are only valid for motion with constant acceleration.
First constant acceleration formula
Relates final velocity, initial velocity, acceleration, and time. This formula does not involve displacement (s).
Second constant acceleration formula
Relates displacement, initial velocity, final velocity, and time. This formula does not involve acceleration (a).
Third constant acceleration formula
Relates displacement, initial velocity, acceleration, and time. This formula does not involve final velocity (v).
Fourth constant acceleration formula
Relates final velocity, initial velocity, acceleration, and displacement. This formula does not involve time (t).
Fifth constant acceleration formula
Relates displacement, final velocity, acceleration, and time. This formula does not involve initial velocity (u).
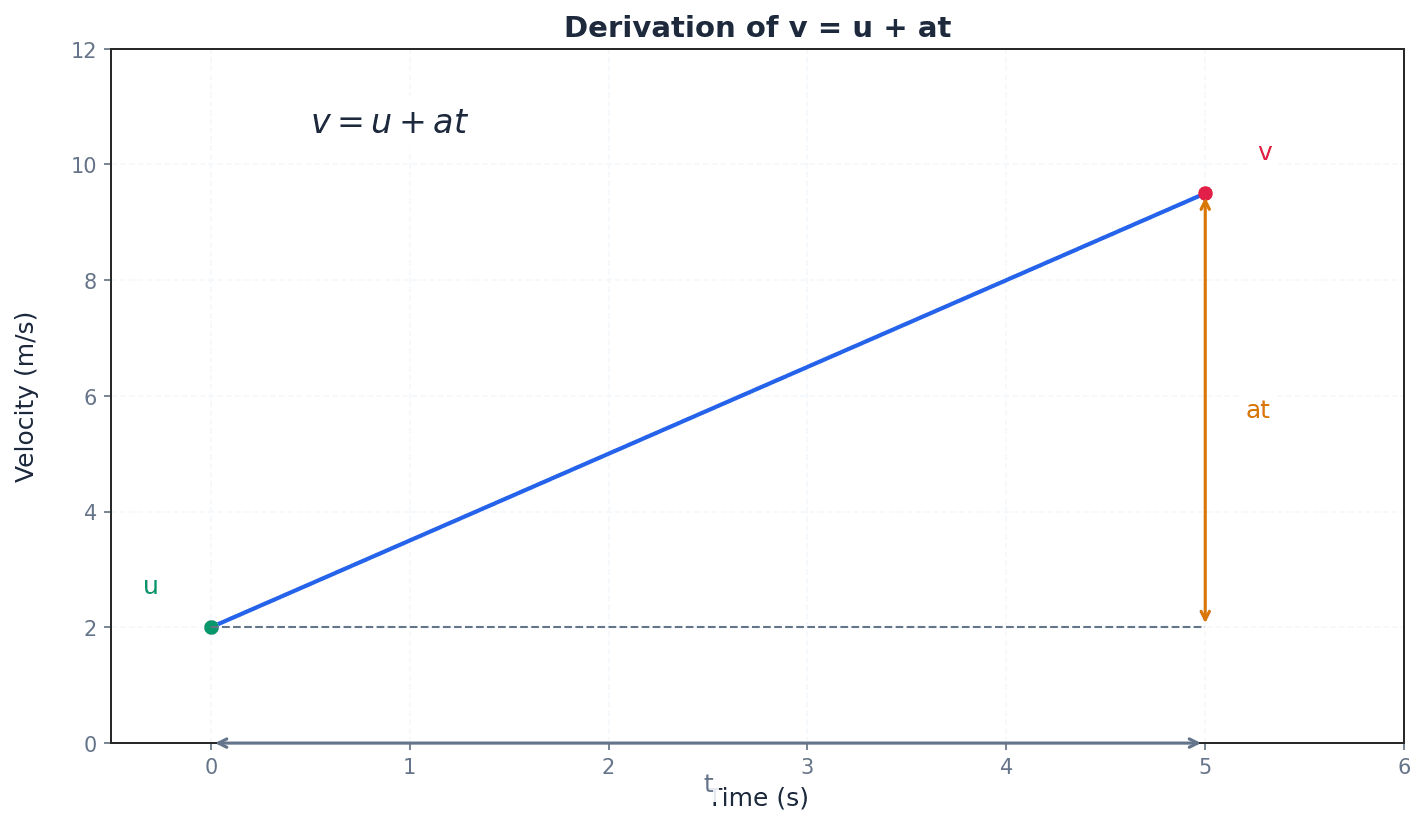
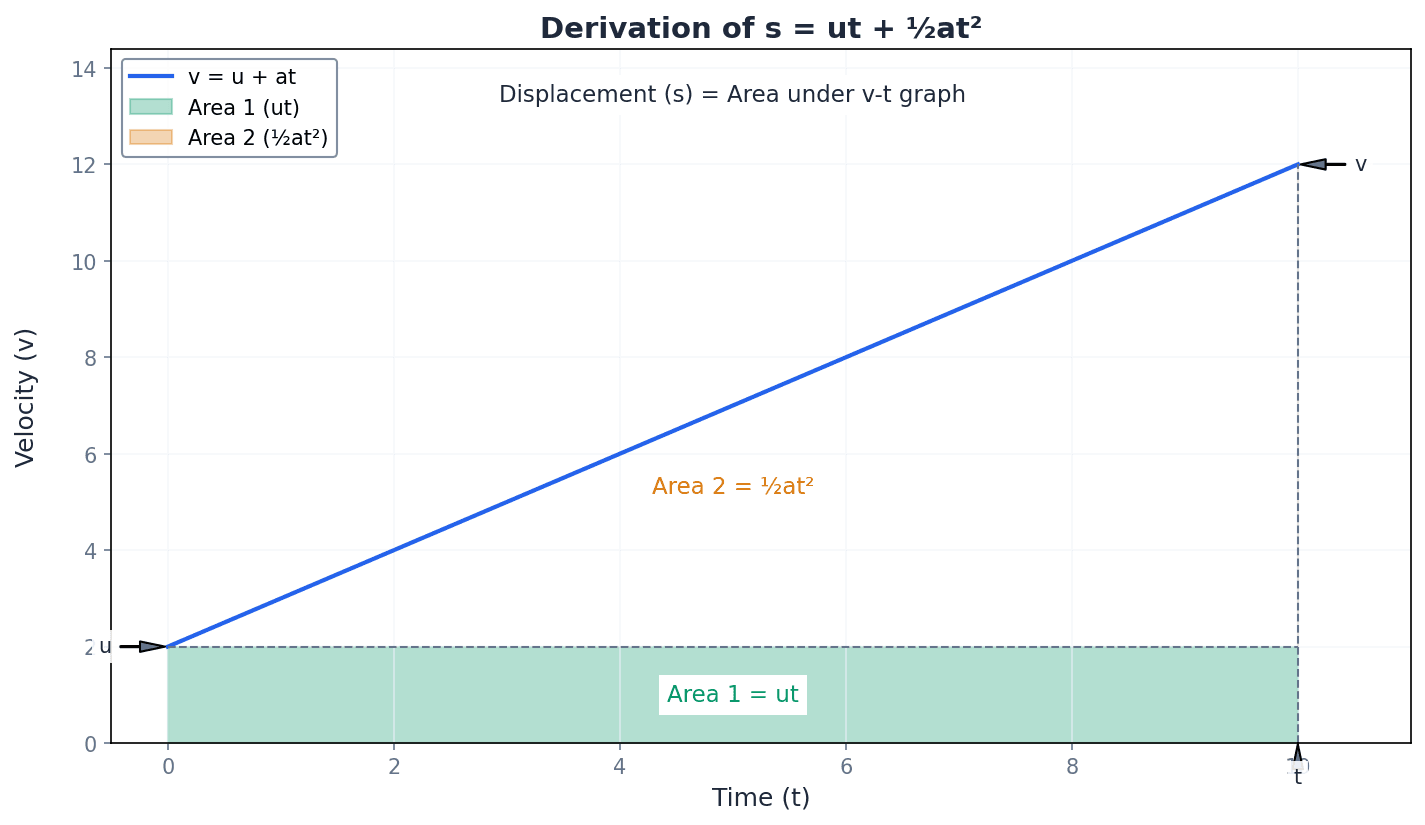
The constant acceleration formulae can be derived from velocity-time graphs. For an object moving with constant acceleration, its velocity-time graph is a straight line. The gradient of this line represents acceleration, and the area under the graph represents displacement. By applying these principles, the five suvat equations can be systematically obtained.
Mathematical modelling begins with making simplifying assumptions to represent complex real-world situations with manageable equations. This involves defining variables with suitable units and setting up equations that describe the motion. It is crucial to ensure consistent units throughout the calculations to avoid errors.
acceleration due to gravity — The acceleration due to gravity (g m s⁻²) is the constant acceleration experienced by all objects falling freely under gravity when air resistance is ignored.
This value varies slightly over the Earth's surface but is commonly taken as 10 m s⁻² or 9.8 m s⁻² in problems. It is always directed vertically downwards. It's like an invisible hand constantly pulling everything downwards with the same strength, making objects speed up as they fall.
Students often assume heavier objects fall faster under gravity without considering air resistance, but actually, in a vacuum (ignoring air resistance), all objects fall with the same acceleration.
Always specify the positive direction (e.g., 'up is positive' or 'down is positive') when dealing with vertical motion under gravity, as this affects the sign of 'g'.
To solve problems involving constant acceleration, first list the known and unknown suvat variables. Then, select the appropriate suvat formula that relates these variables. For problems with multiple stages of motion or simultaneous events, it is often necessary to break the problem down into parts and apply the formulae sequentially, ensuring consistent units and directions.
When solving problems, list the known and unknown suvat variables first to help select the most appropriate formula and avoid unnecessary calculations.
Pay close attention to the sign of velocity in problems, especially when objects change direction or when comparing initial and final velocities.
Ensure time units are consistent with other variables (e.g., seconds with m/s and m/s²); converting between seconds, minutes, and hours is a common source of error.
Once you have an answer, quickly check if it is sensible in the context of the question.
Exam Technique
General Constant Acceleration Problems
Vertical Motion Under Gravity
| Mistake | Fix |
|---|---|
| Applying suvat formulae when acceleration is not constant. | Always verify that acceleration is constant before using suvat equations. If acceleration changes, break the motion into stages where it is constant. |
| Confusing displacement with distance travelled, especially when direction changes. | Remember displacement (s) is a vector from the start to the end point, while distance is the total path length. Pay attention to signs for displacement. |
| Using inconsistent units within a calculation (e.g., mixing km/h and m/s). | Convert all quantities to a consistent set of units (typically SI units: m, s, m/s, m/s²) at the beginning of the problem. |
This chapter introduces Newton's three laws of motion, which are fundamental to understanding forces and their effect on motion. It covers drawing force diagrams, identifying various types of forces, and applying Newton's laws to analyze systems in equilibrium or undergoing acceleration. The distinction between mass and weight is clarified, and mathematical modelling, particularly for air resistance, is explored.
force — A force is a vector: it has a magnitude, or size, and a direction, and also has a line of action.
Forces cause changes in motion (acceleration) or deformation of objects. They are fundamental to Newton's laws of motion. Examples include weight, tension, friction, and normal reaction. Imagine pushing a shopping trolley; the push you apply is a force. It has a strength (magnitude) and a direction (where you're pushing it).
mass — The mass of an object is related to the amount of matter in the object.
Mass is a scalar quantity and is a measure of an object's inertia, its resistance to changes in motion. It is an intrinsic property of an object and does not change with location, unlike weight. Imagine a large boulder and a small pebble. The boulder has more 'stuff' in it, so it has more mass and is harder to get moving or stop.
weight — The weight of an object is the force of gravity pulling it towards the centre of the earth.
Weight is a vector quantity, having both magnitude and direction (vertically downwards). It is calculated as mass multiplied by the acceleration due to gravity (W = mg). Unlike mass, weight changes depending on the gravitational field. Imagine holding an apple; the downward pull you feel is its weight. If you took that apple to the moon, it would still be the same apple (same mass), but it would feel lighter because the moon's gravity is weaker, so its weight would be less.
Students often confuse mass and weight, especially when 'g' changes or in everyday language. Remember that mass is the amount of matter (scalar, kg) and is constant, while weight is the gravitational force (vector, N) and changes with the gravitational field.
newton (N) — A force of 1 newton will give a mass of 1 kilogram an acceleration of 1 m s–2.
The newton is the SI unit of force, defined directly from Newton's Second Law (F=ma). It quantifies the amount of force required to produce a specific acceleration for a given mass. Think of the weight of a small apple; that's roughly 1 Newton. It's the force needed to make a 1 kg object speed up by 1 meter per second, every second.
Weight
Weight is a force, acting vertically downwards. 'g' is approximately 10 m s⁻² on Earth.
Mass is an intrinsic property of an object, representing the amount of matter it contains and its resistance to changes in motion. Weight, on the other hand, is the force of gravity acting on that mass. While mass remains constant regardless of location, weight varies with the strength of the gravitational field, calculated using the formula W = mg, where 'g' is the acceleration due to gravity.
centre of mass — Each weight acts through a point called the centre of mass or centre of gravity.
The centre of mass is the average position of all the mass that makes up an object. For uniform gravitational fields, it is equivalent to the centre of gravity. When modelling an object as a particle, its entire mass is considered to be concentrated at this point. If you try to balance a broomstick on your finger, there's one specific point where it balances perfectly; that's its centre of mass.
particle — An object can be modelled as a particle, that is a point mass, situated at its centre of mass.
This is a modelling assumption where the dimensions of an object are considered negligible. All its mass is concentrated at a single point, and all forces are assumed to act through this point, simplifying analysis by ignoring rotational effects. Imagine a tiny dot representing a car on a map; you're only interested in its movement, not how it spins. A 'particle' model treats an object like that dot.
When drawing force diagrams for extended objects, always show the weight acting vertically downwards through the centre of mass. For particle models, all forces are considered to act at this point.
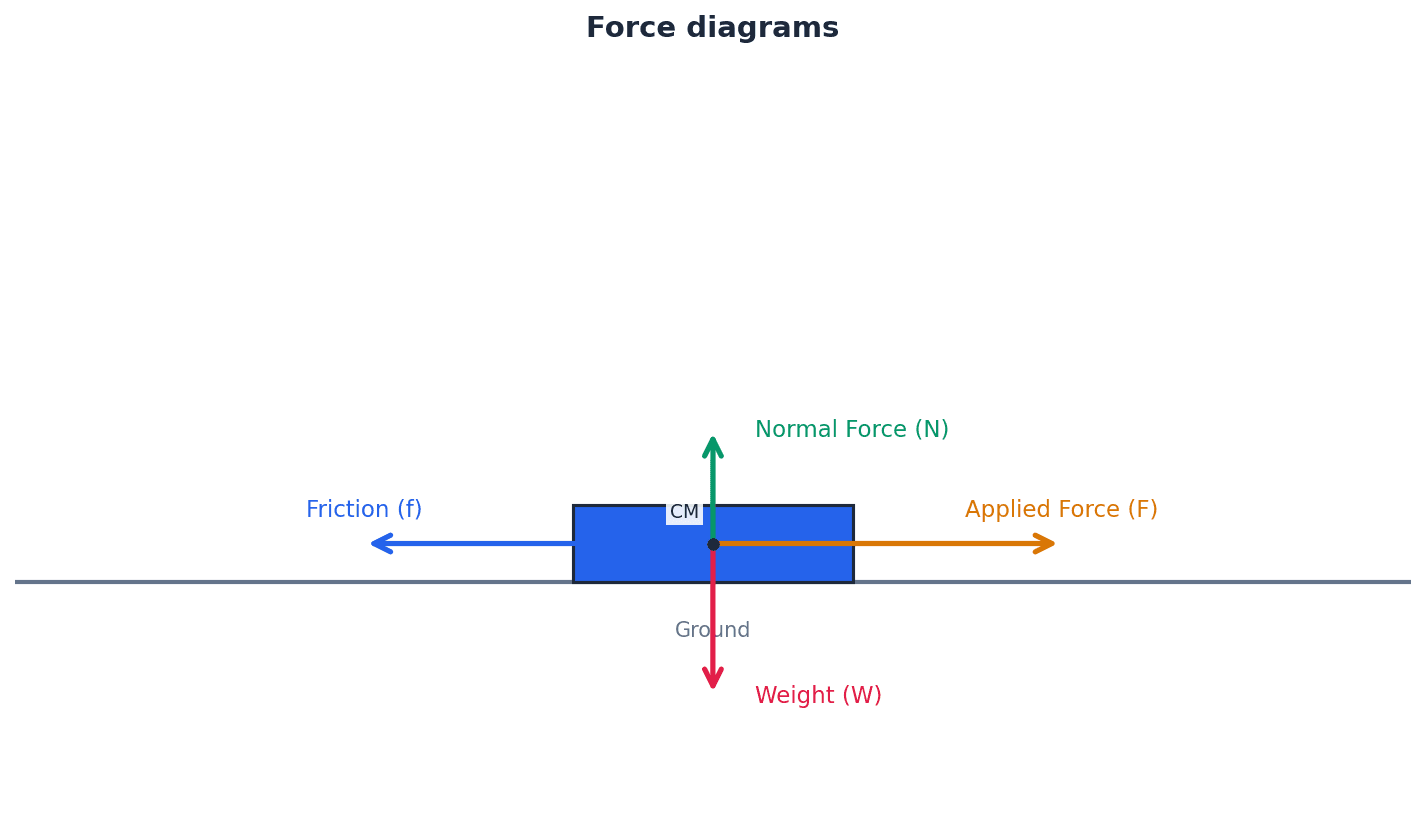
Force diagrams are essential tools for visualizing and analyzing the forces acting on an object or system. They involve representing each force as an arrow, indicating its magnitude, direction, and point of application. Drawing separate diagrams for each object in a connected system helps to clearly identify all interacting forces, such as weight, tension, normal reaction, and friction.
reaction — When one object exerts a force on another there is always a reaction of the same kind which is equal, and opposite in direction, to the acting force.
This is Newton's Third Law. Reaction forces always occur in pairs, acting on different objects. For example, if you push a wall, the wall pushes back on you with an equal and opposite force. When you jump, your feet push down on the ground (action), and the ground pushes back up on your feet (reaction), propelling you upwards.
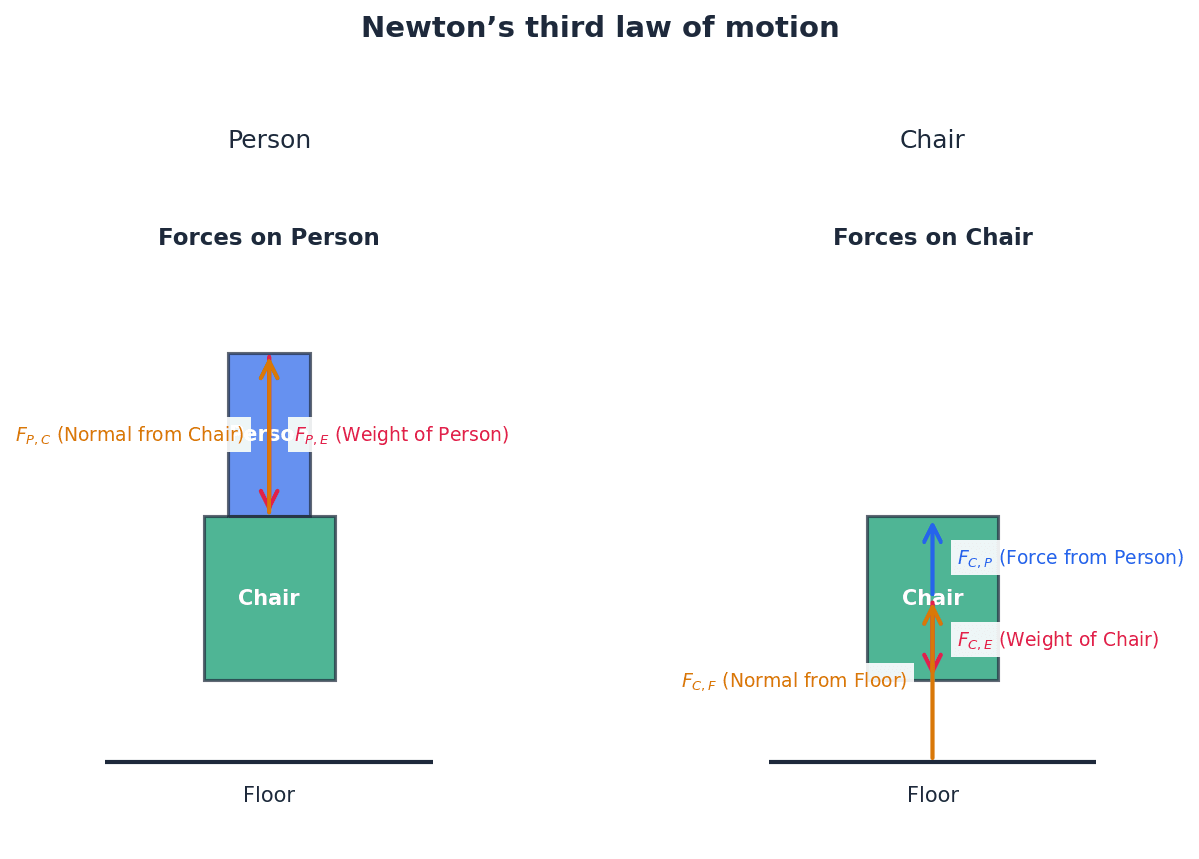
Students often think action and reaction forces act on the same object, but actually they always act on different objects. When identifying action-reaction pairs, ensure the forces are of the same type and act on different objects.
normal reaction — Normal reaction forces are always present when there is any contact between surfaces, acting at right angles to the surface.
This force prevents objects from passing through surfaces. It is a component of the total contact force, perpendicular to the surface. Its magnitude adjusts to balance other forces perpendicular to the surface. When a book rests on a table, the table pushes upwards on the book, perpendicular to its surface, preventing the book from falling through. This upward push is the normal reaction.
Students often think normal reaction is always equal to weight, but actually it only equals weight when the surface is horizontal and there are no other vertical forces. Always draw the normal reaction force perpendicular to the surface of contact, pushing outwards from the surface.
friction — Friction is a force which tends to prevent sliding between two surfaces in contact, acting in a direction which opposes the sliding.
Friction arises from the microscopic irregularities between surfaces. It can be static (preventing motion) or kinetic (opposing motion). When friction is negligible, a surface is described as smooth. When you try to push a heavy box across the floor, the force that makes it hard to move is friction. If the floor is icy (smooth), it's much easier because there's less friction.
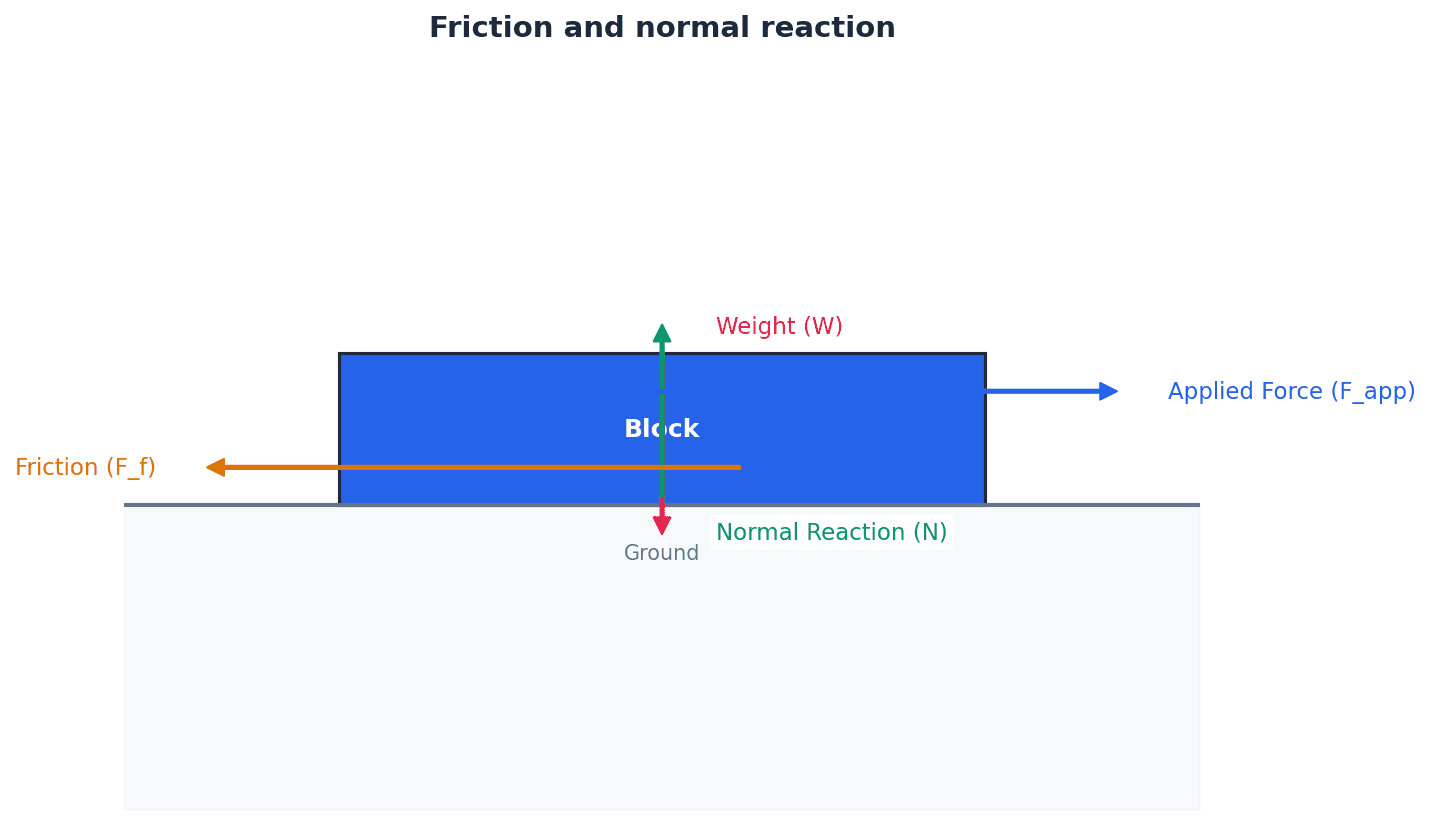
Students often think friction always opposes the applied force, but actually it opposes the *relative motion* or *tendency of motion* between surfaces. Always draw friction parallel to the surface of contact and in the direction opposing the actual or impending motion.
smooth — When the friction between two surfaces is negligible, at least one of the surfaces is said to be smooth.
This is a common modelling assumption in mechanics to simplify problems by ignoring frictional forces. In reality, no surface is perfectly smooth, but some, like oiled surfaces or ice, approximate this condition. Imagine sliding on ice; it's very easy because the ice is 'smooth', meaning there's very little friction.
If a problem states a surface is 'smooth', do not include friction in your force diagrams or calculations. This is a key modelling assumption.
tension — Tension is a pulling force exerted by a string, rope, cable, or similar continuous object.
Tension acts along the length of the string or rod and pulls on the objects attached at its ends. In a smooth, light pulley system, the tension in the string is the same on both sides of the pulley. A rope can only exert tension, not thrust. When you pull a toy car with a string, the force transmitted through the string to the car is tension. The string is 'tense' or stretched.
thrust — When a pencil is pushed inwards, the outward force on each hand is called a thrust, and the pencil is said to be in compression.
Thrust is a pushing force, often associated with objects in compression, like a rigid rod being pushed from both ends. Unlike tension, which pulls, thrust pushes along the line of action. If you push two ends of a rigid stick towards each other, the stick is under 'thrust' or compression.
Students often confuse thrust with tension, but actually tension is a pulling force (stretching), while thrust is a pushing force (compressing). Remember that a string or rope cannot exert a thrust force.
inextensible — A string or rod that does not vary in length is modelled as inextensible.
This is a modelling assumption meaning the string or rod cannot stretch or compress. This implies that all parts of the string and any objects connected by it will have the same magnitude of acceleration. Imagine a steel cable; it's so strong it barely stretches. An 'inextensible' string is modelled as if it doesn't stretch at all.
smooth and light — When a pulley is well designed it takes a relatively small force to make it turn and such a pulley is modelled as being smooth and light.
This is a modelling assumption for pulleys. 'Smooth' means there is no friction in the pulley's axle, so no energy is lost to friction. 'Light' means the pulley's mass is negligible, so no force is required to accelerate the pulley itself. Imagine a perfectly oiled, feather-light bicycle wheel; it spins effortlessly. A 'smooth and light' pulley is modelled as having these ideal properties.
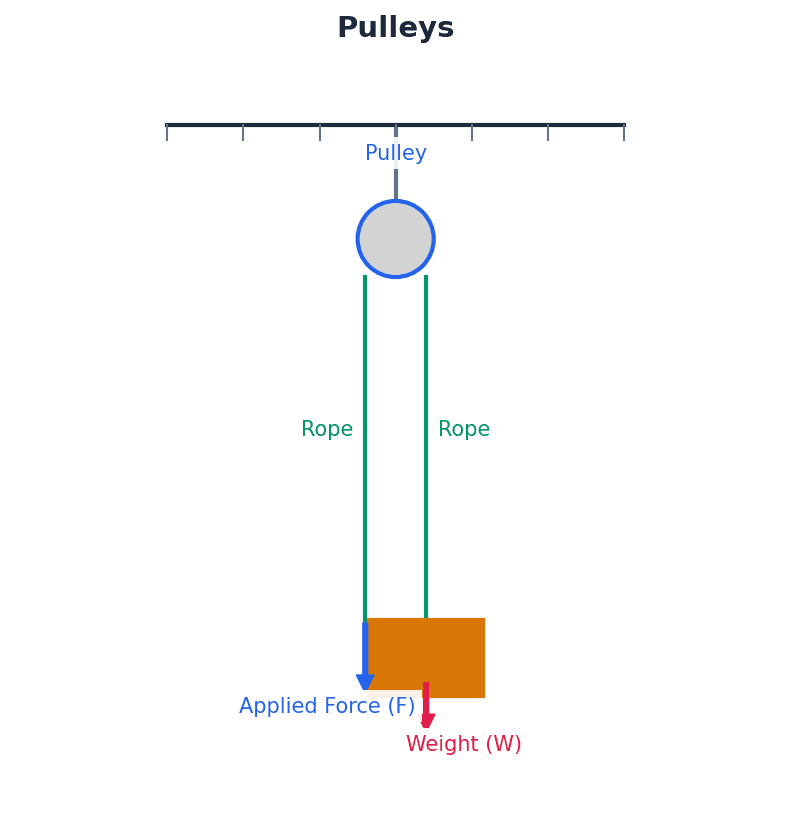
When a pulley is described as 'smooth and light', assume that the tension in the string is the same on both sides of the pulley and that the pulley's mass and rotational inertia can be ignored. If a string is inextensible, the acceleration of objects connected by it will have the same magnitude.
resultant force — A single force that can have the same effect as several forces acting together is called the resultant force.
The resultant force is the vector sum of all individual forces acting on an object. If the resultant force is zero, the object is in equilibrium; if it is non-zero, the object will accelerate in the direction of the resultant force according to Newton's Second Law (F=ma). If several people push a car in different directions, the car will move as if a single, stronger person pushed it in one specific direction; that single push is the resultant force.
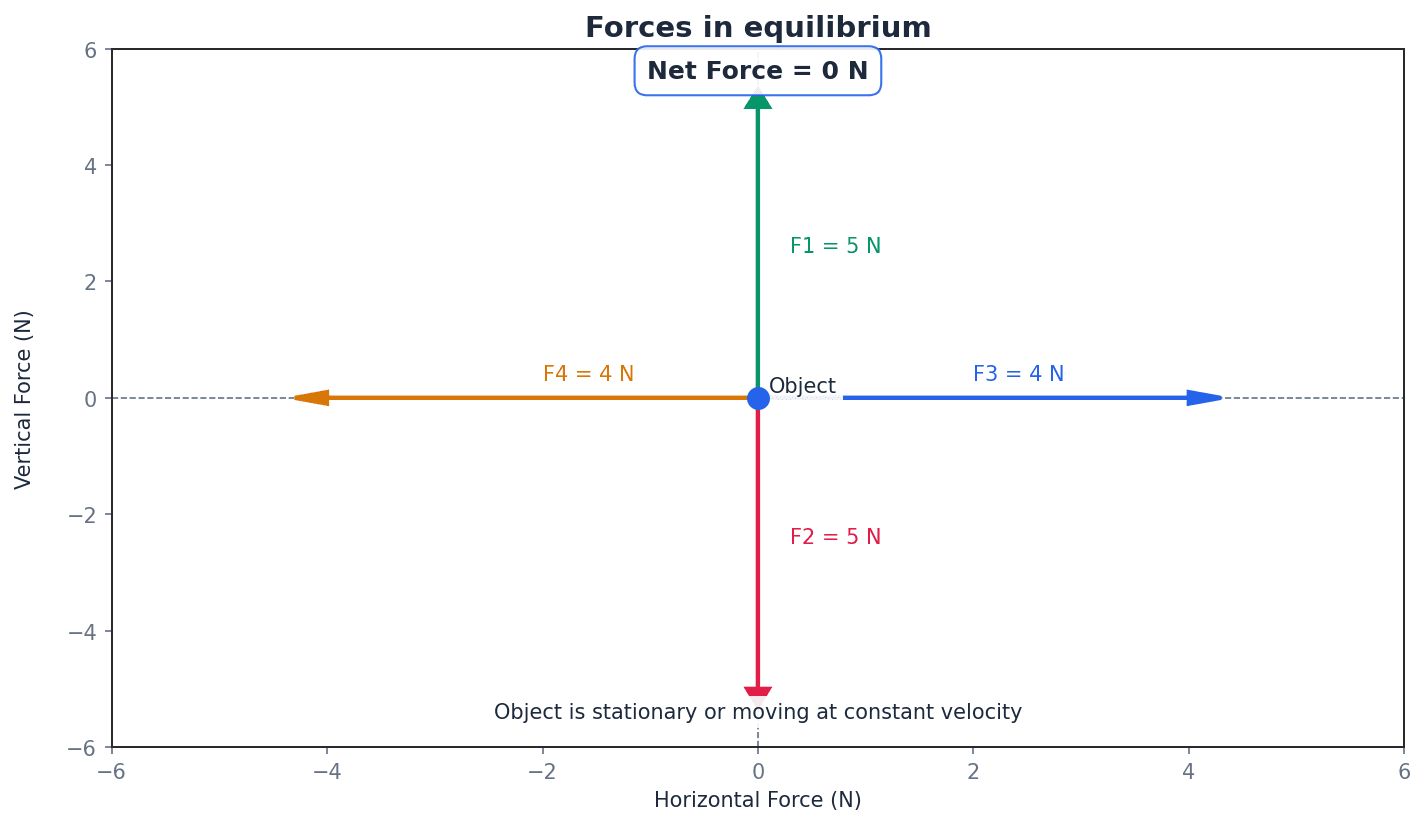
equilibrium — The forces on an object are said to be in equilibrium if the resultant force is zero, meaning there is no change in motion.
An object in equilibrium is either at rest or moving with a constant velocity in a straight line (Newton's First Law). This means all forces acting on it are balanced, and their vector sum is zero. If you're standing still on a bus, the forces on you (your weight downwards, the floor's reaction upwards) are in equilibrium. If the bus speeds up or slows down, you are no longer in equilibrium.
Students often think equilibrium only means 'at rest', but actually it also includes moving at a constant velocity. For equilibrium problems, explicitly state that the resultant force is zero and set up equations where the sum of forces in perpendicular directions equals zero.
Newton's First Law states that an object will remain at rest or continue to move with a constant velocity unless acted upon by a resultant external force. This means that if the resultant force on an object is zero, its acceleration is zero, and its state of motion (either stationary or constant velocity) will not change. This concept is central to understanding equilibrium.
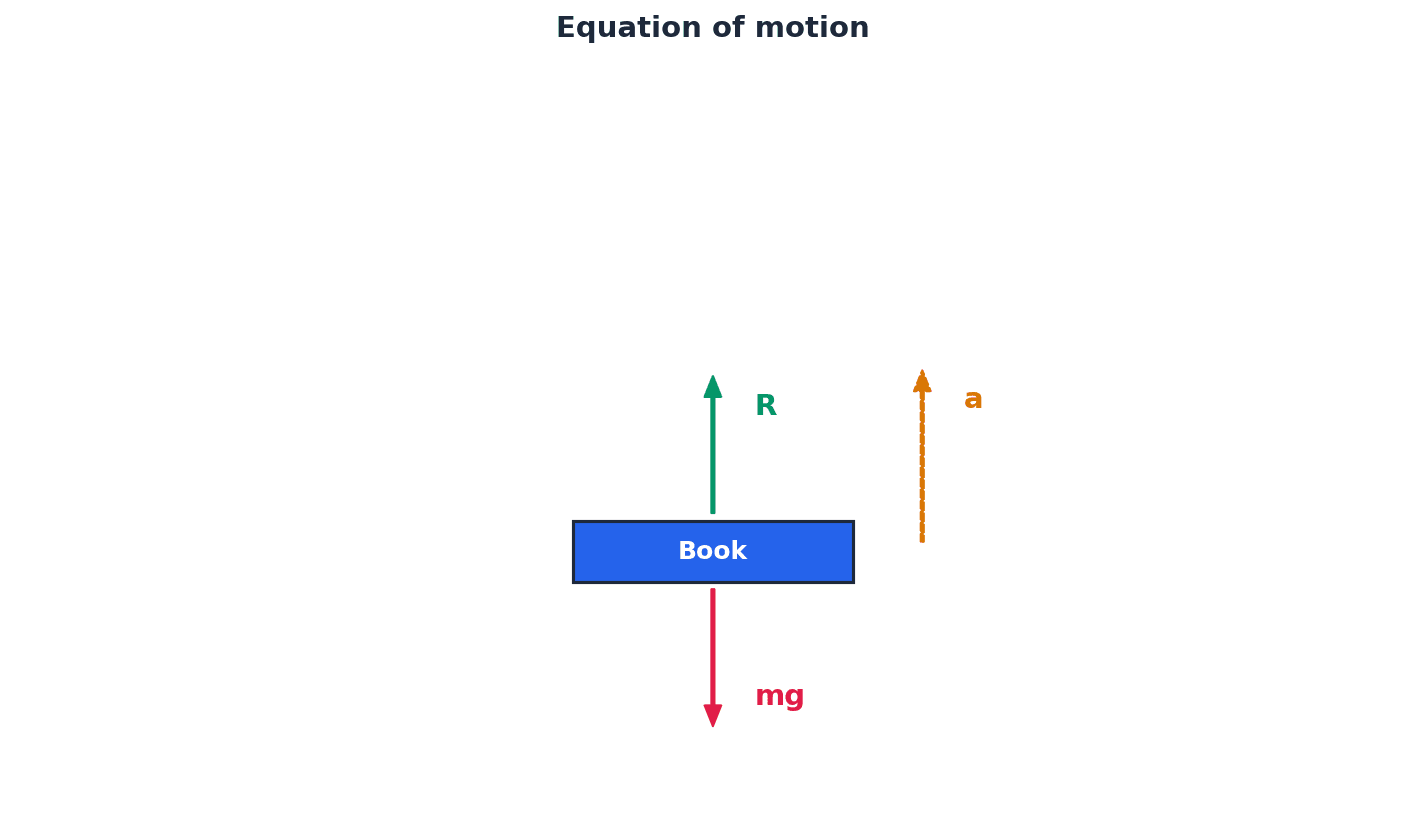
Newton's Second Law
Applies when the mass is constant. The resultant force and acceleration are always in the same direction.
Newton's Second Law quantifies the relationship between force, mass, and acceleration. It states that the resultant force acting on an object is directly proportional to its acceleration and in the same direction, and inversely proportional to its mass. This is expressed by the formula F = ma, where F is the resultant force, m is the mass, and a is the acceleration. This law is crucial for analyzing systems undergoing acceleration.
air resistance — A resistance force is present whenever a solid object moves through a liquid or gas, acting in the opposite direction to the motion and depending on the speed of the object.
Air resistance is a type of drag force that opposes the motion of an object through the air. It increases with the speed of the object and its cross-sectional area perpendicular to the motion. It is often modelled as negligible for simplicity in introductory mechanics. When you stick your hand out of a moving car window, you feel a force pushing it back; that's air resistance. The faster the car goes, the stronger the push.
Students often think air resistance is always constant, but actually it depends on factors like speed, shape, and surface area, and is often modelled as proportional to speed or speed squared. In problems, explicitly state if you are assuming air resistance is negligible or if you are including it in your force diagrams and calculations.
Always start by drawing a large, clear force diagram for each object, labelling all forces (W, R, T, F). When using F=ma, resolve forces parallel and perpendicular to the direction of acceleration. The net force is in the direction of 'a'.
For connected particles (e.g., car and trailer, pulley systems), draw a separate force diagram and apply F=ma to each particle individually. In pulley problems, remember that for a single light inextensible string, the tension is the same throughout.
Pay close attention to modelling keywords: 'smooth' means no friction; 'light' means mass is negligible; 'particle' means dimensions are ignored. Forgetting the implications of these assumptions is a common trap.
Exam Technique
Drawing Force Diagrams
Analyzing Forces in Equilibrium (Newton's First Law)
| Mistake | Fix |
|---|---|
| Confusing mass and weight. | Remember mass is the amount of matter (scalar, kg) and is constant, while weight is the gravitational force (vector, N) and changes with 'g'. Use W=mg for weight. |
| Drawing action-reaction pairs on the same object. | Newton's Third Law pairs always act on *different* objects. For example, the table pushes on the book, and the book pushes on the table. |
| Assuming normal reaction is always equal to weight. | Normal reaction equals weight only on a horizontal surface with no other vertical forces. On inclined planes or with additional vertical forces, it must be calculated by resolving forces perpendicular to the surface. |
This chapter focuses on applying Newton's second law (F=ma) to solve problems involving linear motion. It covers formulating equations of motion for single objects and systems of connected objects, emphasizing clear force diagrams, consistent positive direction, and the integration of suvat formulae for kinematic analysis.
resultant force — A resultant force is required to produce an acceleration.
The resultant force is the vector sum of all individual forces acting on an object. It is this net force that causes an object to accelerate according to Newton's second law. If you have several people pushing a box in different directions, the resultant force is like the single push that would have the same effect on the box's movement.
Students often confuse resultant force with individual forces, failing to sum all forces acting on an object to find the net force. Remember that only the resultant (net) force causes acceleration; if forces balance, the resultant force is zero and there is no acceleration.
equation of motion — When Newton’s second law is applied, the resulting equation is called the equation of motion.
This equation mathematically describes the relationship between the resultant force acting on an object, its mass, and its acceleration. It is derived directly from F=ma and is fundamental to solving dynamics problems. Think of it like a recipe for movement: if you know the ingredients (forces and mass), the equation tells you how fast the dish (object) will cook (accelerate).
Newton's Second Law (Equation of Motion)
The resultant force and acceleration are always in the same direction. Units must be consistent (Newtons, kilograms, metres per second squared).
Always clearly state the equation of motion for each object or system, defining your positive direction, before substituting values. This shows clear understanding and earns method marks.
Students often forget to define a positive direction for forces and acceleration, leading to sign errors in equations of motion.
Newton's second law, F=ma, is fundamental to solving problems involving linear motion. The resultant force acting on an object determines its acceleration. If an object is at rest or moving at a constant velocity, its acceleration is 0, meaning the resultant force is also 0. This principle is applied to single objects under various conditions, such as lifts, and extends to more complex systems of connected objects.
normal reaction — The normal reaction is the force exerted by a surface on an object in contact with it, acting perpendicular to the surface.
This force prevents an object from passing through a surface. Its magnitude adjusts to balance other forces perpendicular to the surface, or to provide a resultant force for acceleration perpendicular to the surface. When you stand on the floor, the normal reaction is the upward push from the floor that stops you from falling through it.
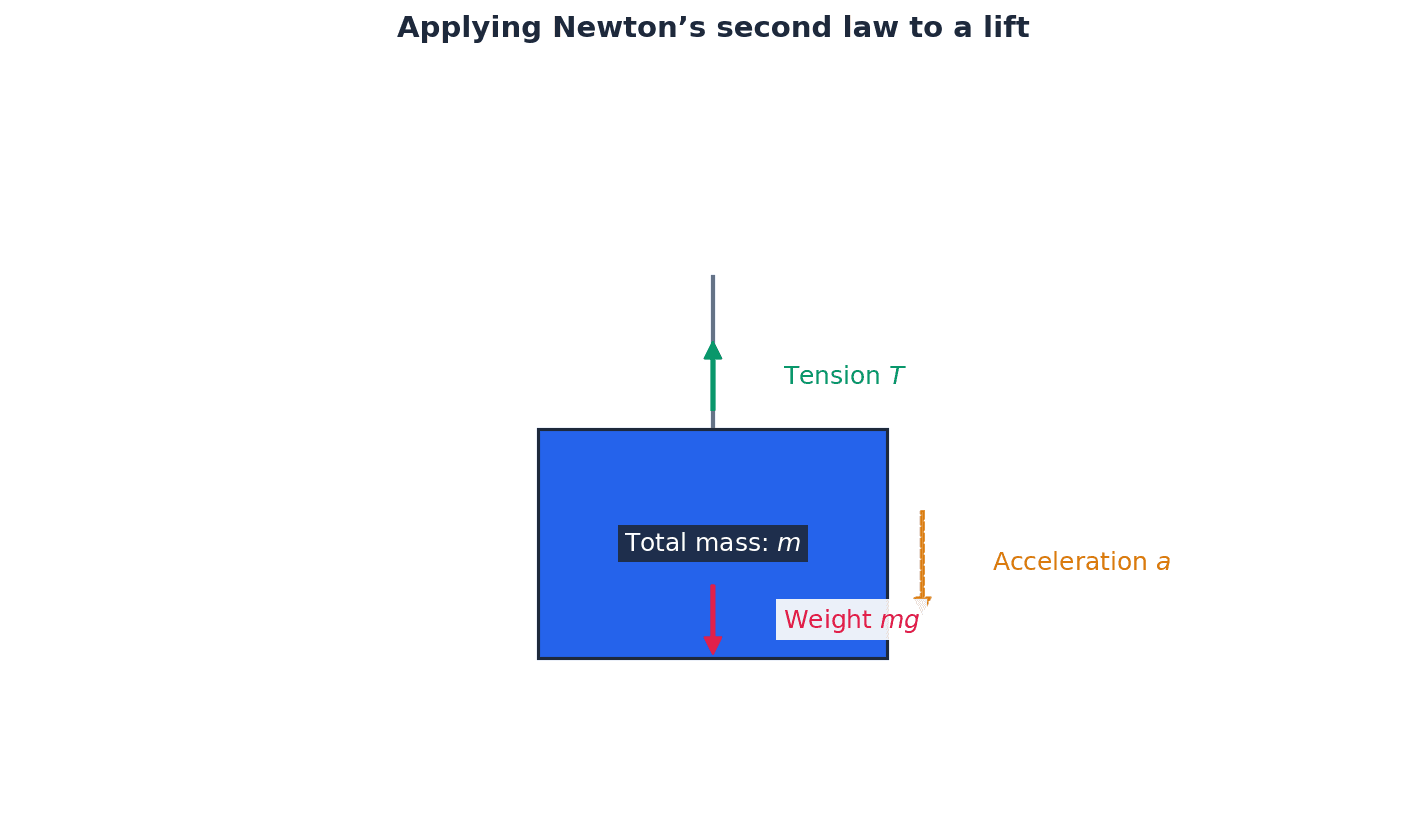
Students often assume normal reaction is always equal to weight, but it varies with vertical acceleration. In a lift, the normal reaction force changes with acceleration: R > mg when accelerating up, R < mg when accelerating down.
Always draw the normal reaction force perpendicular to the surface of contact. In lift problems, remember that the normal reaction is what a person 'feels' as their apparent weight.
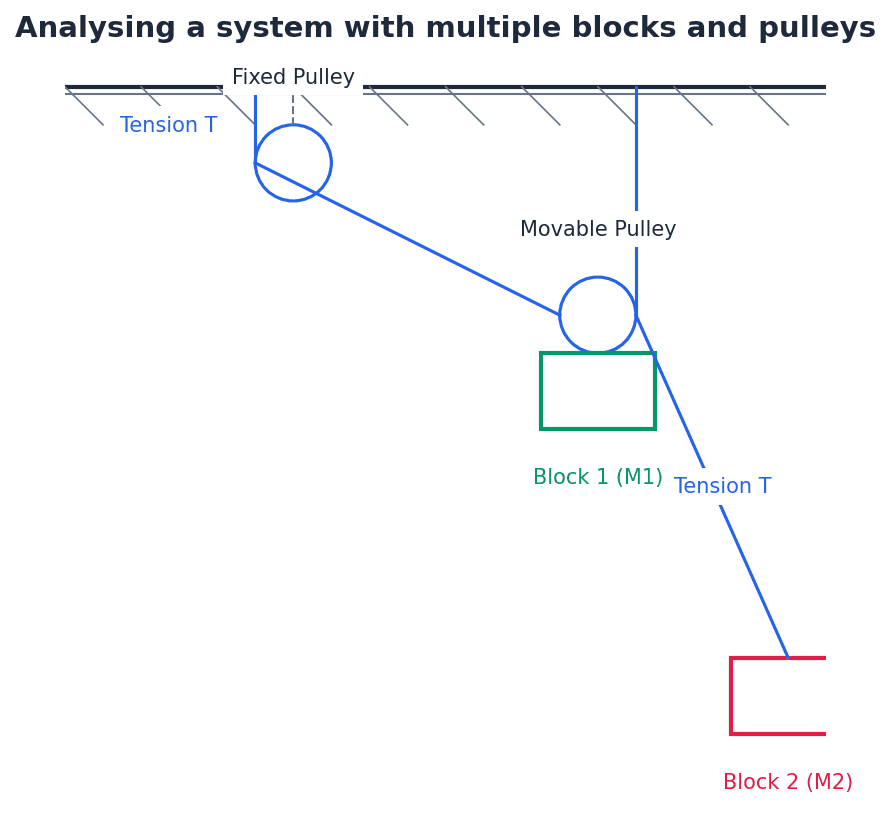
Newton's second law can be applied to systems of connected objects, such as those involving tow bars or pulleys. For these systems, it is often useful to consider the system as a whole to find the overall acceleration, or to analyze individual components to determine internal forces like tension. Clear force diagrams are essential for correctly identifying all forces and their directions within such systems.
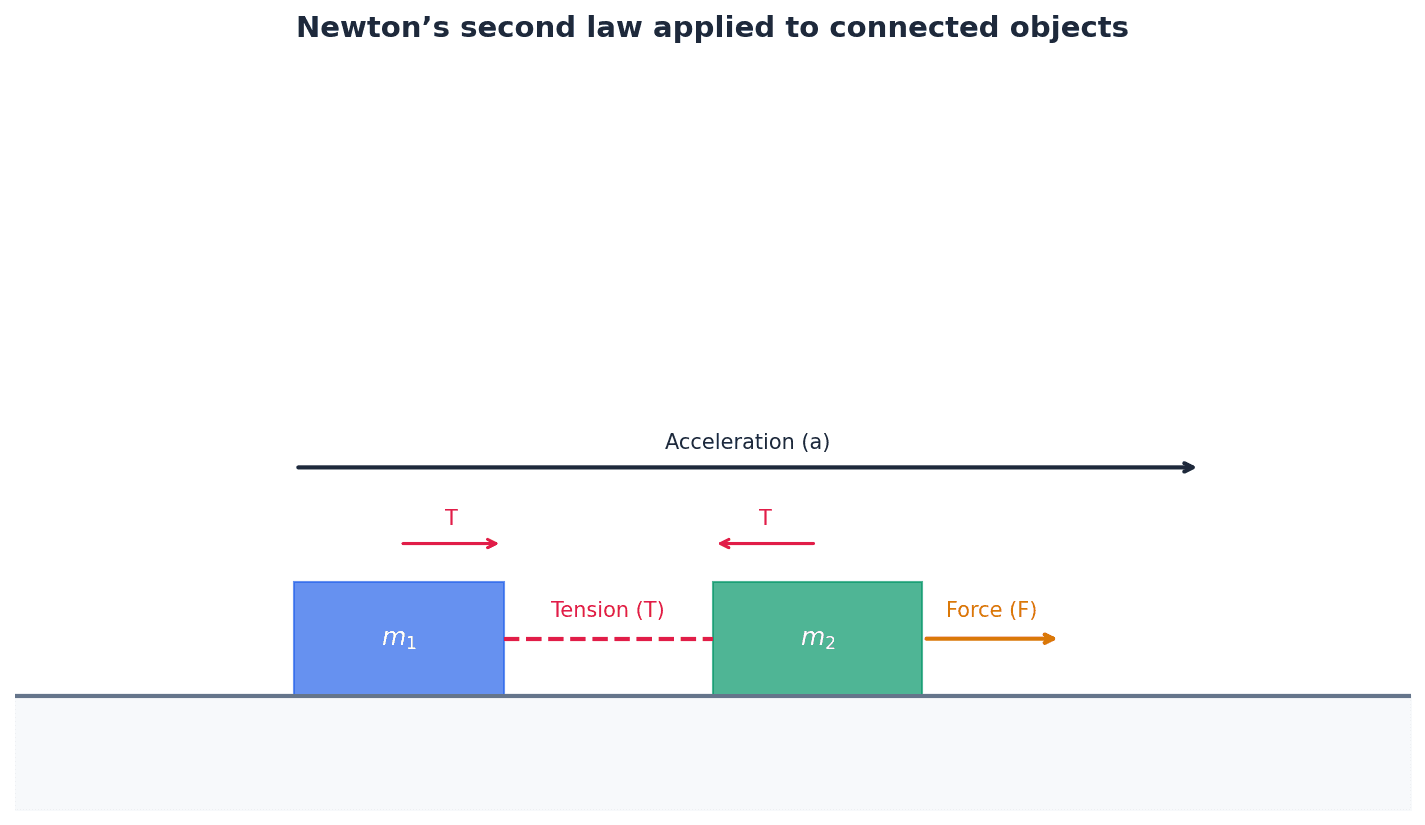
tension — Tension is a pulling force transmitted axially by means of a string, cable, chain, or similar one-dimensional continuous object.
In the context of connected objects, tension is the force exerted along a string or rope. For a light, inextensible string passing over a smooth pulley, the tension is considered to be the same throughout the string. Imagine pulling a toy car with a string; the tension is the pulling force you feel in the string, and it's the same force pulling the car.
Students often think that tension in a string is always equal to the weight of the object it supports, but it changes with acceleration; it's only equal to weight when the object is at rest or moving at constant velocity.
When dealing with connected objects, draw separate force diagrams for each object to correctly identify the tension acting on each, ensuring consistency in direction.
To simplify mechanics problems, certain modelling assumptions are frequently made. These idealisations allow for straightforward application of Newton's laws without needing to account for complex real-world factors. Understanding these assumptions is crucial for setting up accurate equations of motion.
light inextensible string — A light inextensible string is a modelling assumption where the string has negligible mass and does not stretch.
This assumption simplifies problems by ensuring that the tension is uniform throughout the string and that connected objects have the same magnitude of acceleration. Imagine a perfectly strong, weightless fishing line that never stretches; it transmits force instantly and perfectly.
smooth fixed pulley — A smooth fixed pulley is a modelling assumption where the pulley has no friction and its mass is negligible, and it does not move.
This assumption means that the tension in the string on both sides of the pulley is the same, and no energy is lost due to friction or used to accelerate the pulley itself. Think of a perfectly oiled, weightless wheel that just changes the direction of a rope without any effort.
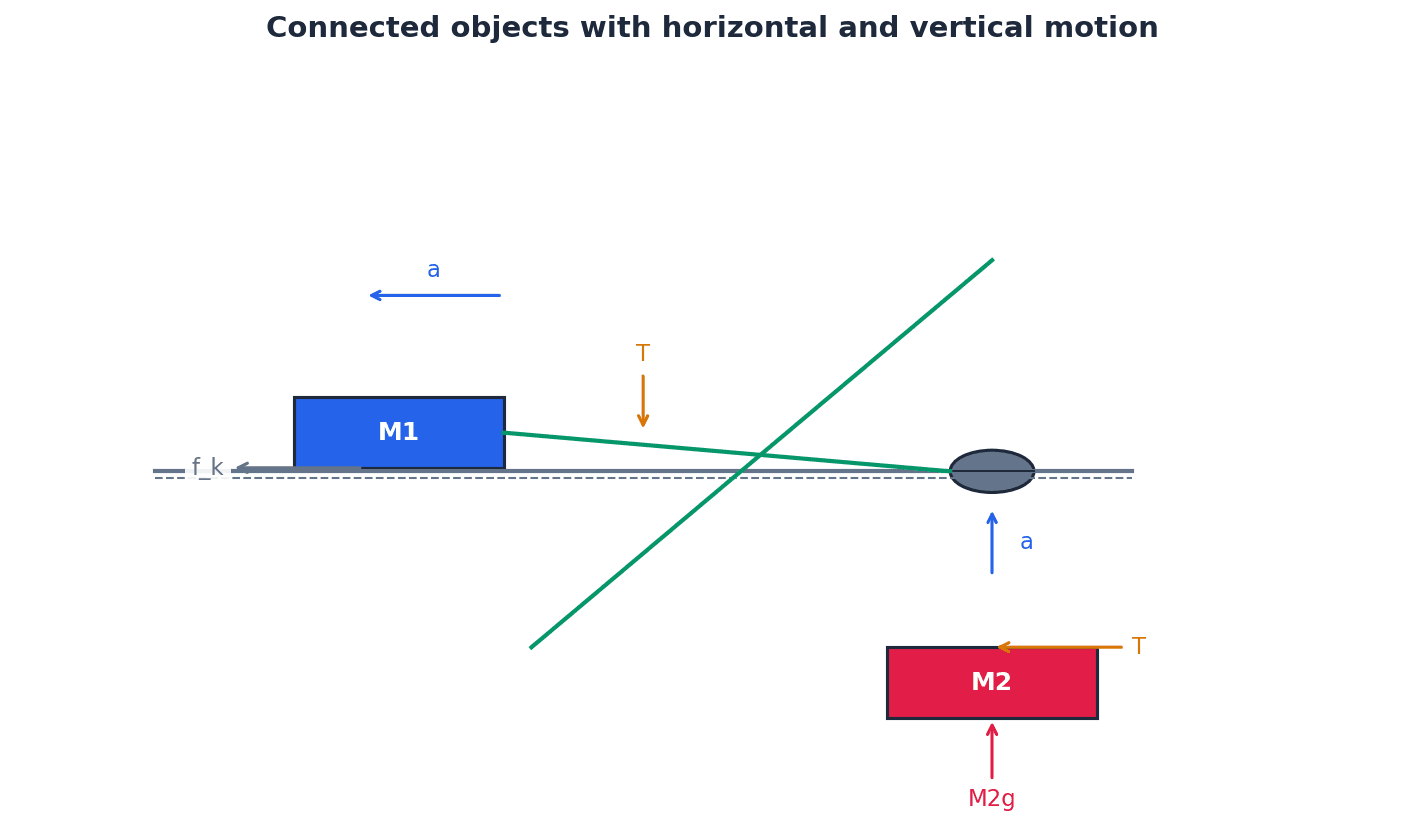
For a smooth pulley, the tension on either side of the pulley is equal. This is a crucial simplification for setting up equations of motion for connected systems.
Newton's second law provides the acceleration of an object, which can then be used in conjunction with the suvat formulae to solve kinematic problems. This allows for the determination of displacement, velocity, or time, given initial conditions and constant acceleration. This combined approach is essential for a comprehensive analysis of motion.
Students often neglect to convert units (e.g., tonnes to kg, minutes to seconds) before applying formulas, leading to incorrect answers.
Always start by drawing a large, clear force diagram for EACH object, labelling all forces (Weight, Tension, Normal Reaction, etc.). Clearly define and state the positive direction of motion on your diagram, usually in the direction of acceleration.
For connected particles, set up a separate F=ma equation for each particle along the line of motion. After finding acceleration using F=ma, use the suvat formulae to solve for displacement, velocity, or time. To find internal forces like tension, you must apply F=ma to a single particle within the system.
Exam Technique
Single object, linear motion (e.g., lift problems)
Connected objects (e.g., pulleys, tow bars)
| Mistake | Fix |
|---|---|
| Assuming tension is always equal to the weight of the object it supports. | Remember that tension changes with acceleration; it is only equal to weight when the object is at rest or moving at constant velocity (i.e., acceleration is zero). |
| Forgetting to define a positive direction for forces and acceleration. | Always clearly state and indicate the positive direction on your force diagram. This prevents sign errors in your equations of motion. |
| Confusing resultant force with individual forces. | The 'F' in F=ma is the *resultant* (net) force, which is the vector sum of all individual forces acting on the object. If forces balance, the resultant force is zero, and there is no acceleration. |
This chapter introduces vectors as quantities with both magnitude and direction, contrasting them with scalar quantities. It covers fundamental vector operations like graphical and algebraic addition/subtraction, resolving vectors into components, and applying these techniques to displacement, velocity, acceleration, and force.
scalar quantity — A scalar quantity has only magnitude.
Scalar quantities are fully described by a numerical value and a unit, without any associated direction. Examples include mass, time, temperature, and speed. If you say 'it's 20 degrees Celsius', you've given a scalar quantity; the temperature doesn't have a direction.
vector — A vector has size (magnitude) and direction.
Vectors are crucial for describing physical quantities that require both a value and an orientation in space, such as displacement, velocity, acceleration, and force. They are represented graphically by arrows where length indicates magnitude and the arrowhead indicates direction. Imagine giving directions: 'walk 5 blocks' is a scalar, but 'walk 5 blocks north' is a vector.
Students often confuse scalar quantities (like speed or distance) with vector quantities (like velocity or displacement) and use them interchangeably. Remember that speed is a scalar (magnitude only) while velocity is a vector (magnitude and direction).
When asked to define a vector, ensure you explicitly state both 'magnitude' and 'direction' to secure full marks. For calculations, always include units and direction in your final answer.
displacement — Displacement is a vector quantity representing the change in position of an object.
It describes how far an object is from its starting point and in what direction. Unlike distance, which is a scalar, displacement only depends on the initial and final positions, not the path taken. If you walk around a block and end up back where you started, your distance traveled is the perimeter of the block, but your displacement is zero.
displacement vector — A displacement vector is an arrowed line representing the change in position from one point to another.
Its length represents the magnitude of the displacement, and the arrow indicates the direction. It is a specific type of vector used to describe movement or position change. Think of a treasure map: 'Go 10 paces east, then 5 paces north' describes two displacement vectors, and the final location relative to the start is the resultant displacement vector.
position vector — A position vector is the displacement of a point from the origin.
It uniquely identifies the location of a point in space relative to a fixed reference point (the origin). Position vectors are often denoted by a single letter (e.g., 'a' for point A) and are crucial for defining the relative positions of different points. Think of a GPS coordinate: it tells you exactly where you are relative to a fixed global origin.
Displacement vector between two points
Calculates the displacement from point A to point B using their position vectors relative to an origin.
velocity — Velocity is a vector quantity representing the rate of change of displacement.
It describes both the speed of an object and its direction of motion. Velocity is crucial for understanding motion in two or three dimensions, as it provides a complete description of how an object's position changes over time. A car's speedometer shows its speed (scalar), but to know its velocity, you also need to know if it's going north, south, east, or west.
acceleration — Acceleration is a vector quantity representing the rate of change of velocity.
Since velocity is a vector, acceleration can involve a change in speed, a change in direction, or both. It is a key concept in Newton's laws of motion, linking force and mass. When you press the accelerator pedal in a car, you're changing its speed; when you turn the steering wheel, you're changing its direction, both of which are forms of acceleration.
Students often think acceleration only means speeding up, but it also includes slowing down (negative acceleration) or changing direction at a constant speed. A change in direction, even at constant speed, constitutes a change in velocity and therefore acceleration.
force — Force is a vector quantity that can cause a change in an object's motion (acceleration).
Forces have both magnitude (how strong they are) and direction (which way they push or pull). Multiple forces acting on an object can be combined using vector addition to find a single resultant force. If two people push a box, the box moves in a direction that is a combination of their individual pushes, and the strength of that combined push is the resultant force.
Newton's Second Law (vector form)
Relates force, mass, and acceleration. Force and acceleration vectors are parallel.
Remember that acceleration is parallel to the net force acting on an object, as per Newton's second law. When calculating acceleration from force and mass, ensure the acceleration vector's direction matches the force vector's direction.
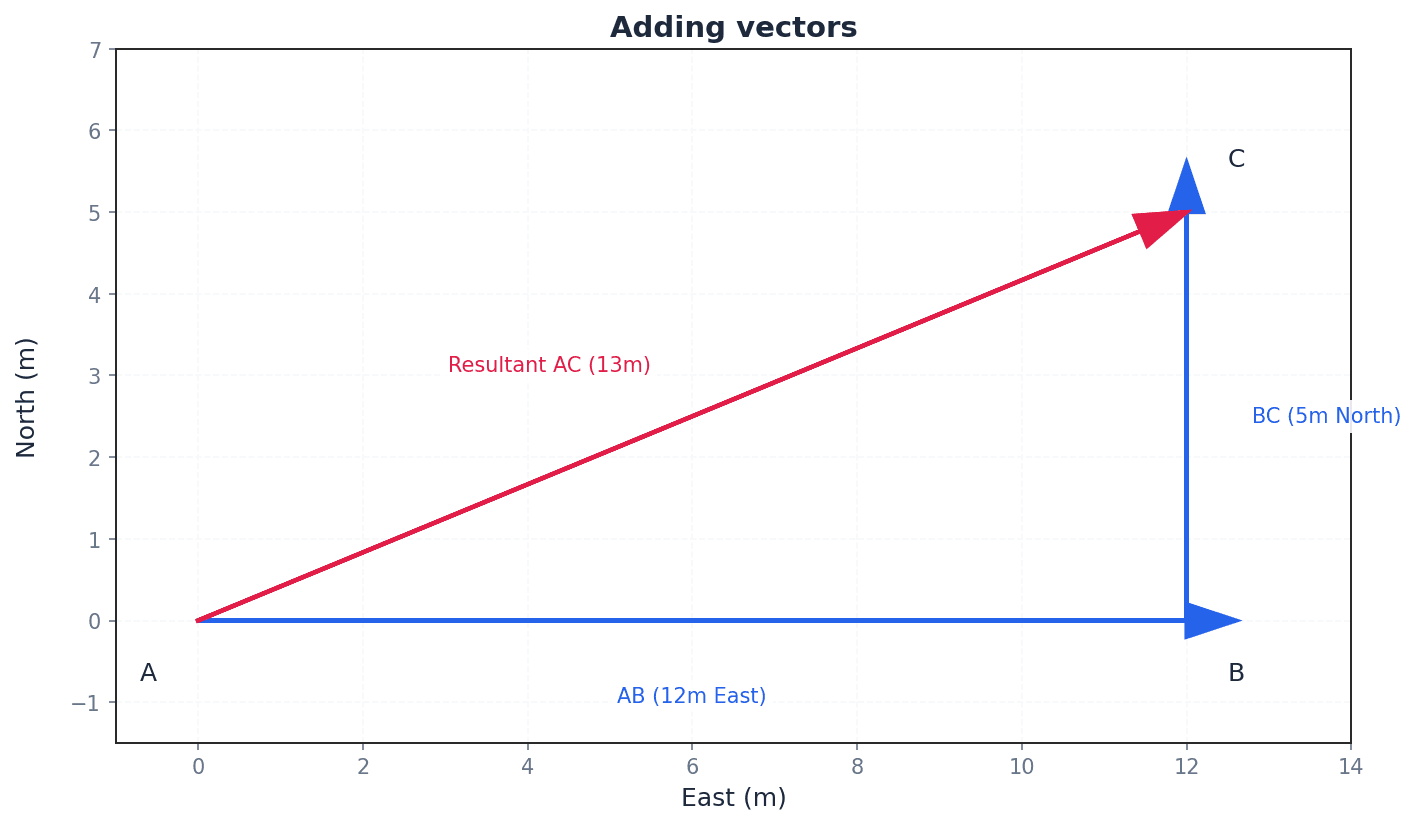
resultant vector — The resultant vector is the single vector that represents the combined effect of two or more vectors.
It is found by vector addition, either graphically (head-to-tail method) or algebraically (using components). The resultant vector has the same effect as all the individual vectors acting together. If you push a trolley forward and someone else pushes it sideways, the trolley moves diagonally; this diagonal movement is the resultant of your two pushes.
vector addition — Vector addition is the process of combining vectors to find their resultant vector.
This can be done graphically by placing vectors head-to-tail or algebraically by adding their corresponding components. It is a fundamental operation for solving problems involving multiple vector quantities acting simultaneously. Imagine two currents in a river: one flowing downstream and another pushing sideways; a boat's actual movement is the vector addition of these two currents and its own propulsion.
Students often think the resultant vector's magnitude is always the sum of the individual magnitudes, but this is only true if the vectors are in the same direction; otherwise, vector addition rules apply. Do not simply add magnitudes directly.
When performing vector addition, ensure you correctly apply the head-to-tail rule for graphical methods or add corresponding components for algebraic methods.
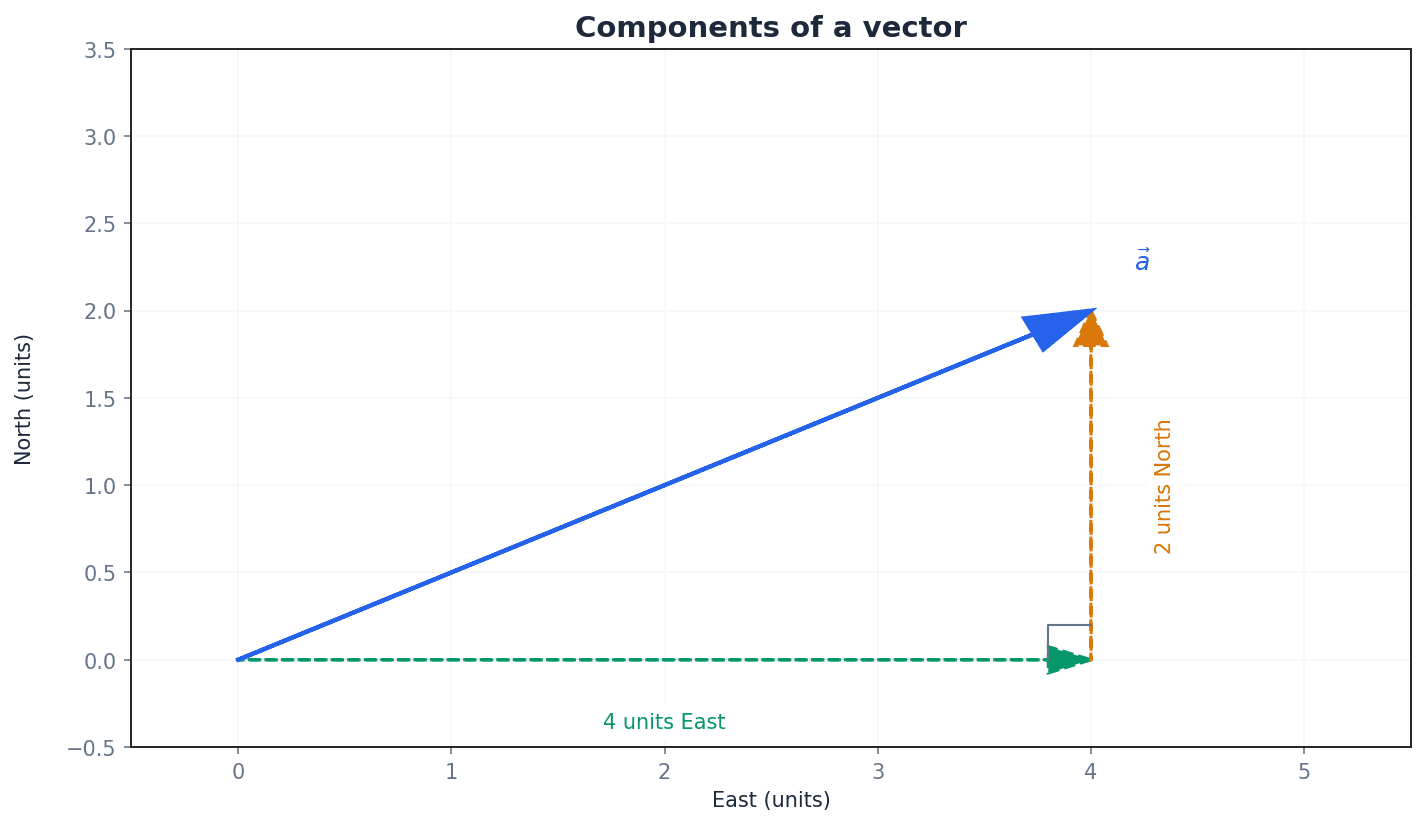
components — Components are two or more vectors that sum to a given vector, usually chosen to be in convenient, often perpendicular, directions.
Splitting a vector into its components (e.g., horizontal and vertical) simplifies vector addition and subtraction, as components in the same direction can be added or subtracted algebraically. This process is called resolving a vector. Imagine pushing a heavy box diagonally; your push can be thought of as two separate pushes: one directly forward and one directly sideways. These are the components of your diagonal push.
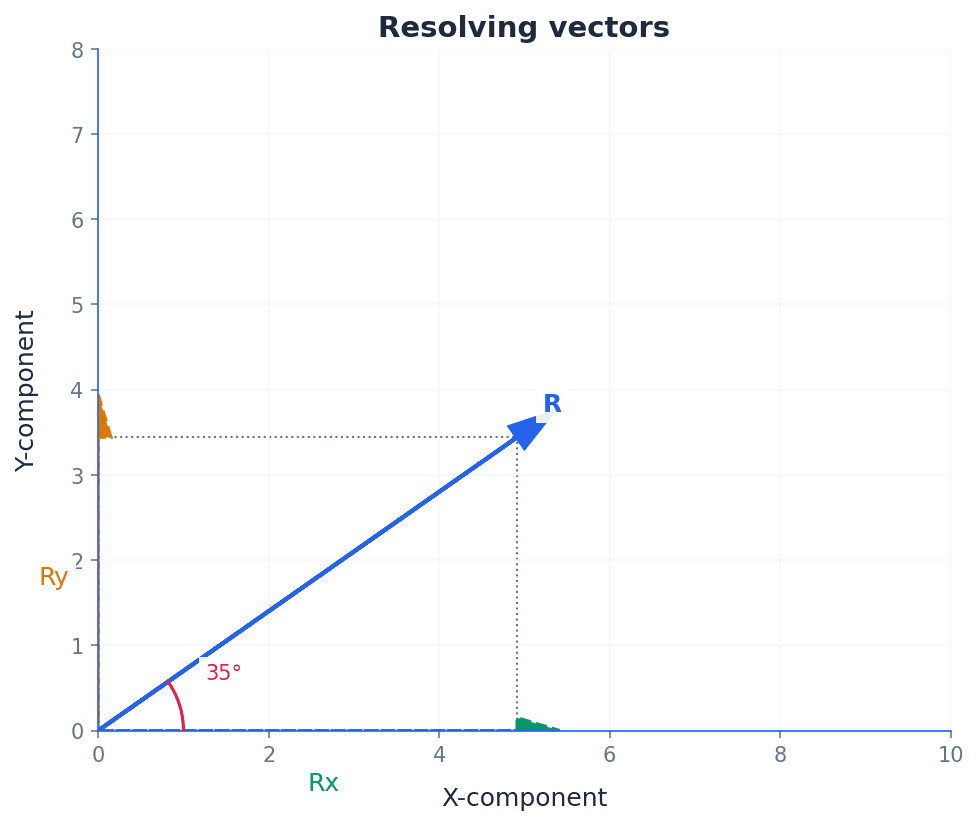
Resolving a vector involves breaking it down into its perpendicular components, typically horizontal (x) and vertical (y). This technique is fundamental for simplifying vector problems, especially when dealing with multiple forces or velocities acting at different angles. Once resolved, components in the same direction can be added or subtracted algebraically.
Resolving a vector into components (x-component)
Used to find the x-component of a vector given its magnitude 'r' and angle '\theta' with the x-axis.
Resolving a vector into components (y-component)
Used to find the y-component of a vector given its magnitude 'r' and angle '\theta' with the x-axis.
Always resolve vectors into perpendicular components (e.g., horizontal and vertical, or parallel and perpendicular to a surface) as this simplifies calculations significantly, especially for forces on inclined planes.
Failing to resolve vectors into perpendicular components when adding or subtracting them will lead to incorrect calculations. Always draw a free-body diagram and resolve forces into perpendicular components before summing them.
column vector — A column vector is a notation for representing a vector by listing its components vertically.
For a 2D vector, it typically has two components, one for the x-direction and one for the y-direction. This notation simplifies algebraic operations like addition, subtraction, and scalar multiplication, as these operations are performed directly on the corresponding components. Think of a shopping list for ingredients: '2 apples, 3 bananas'. A column vector is similar, but for directions: '4 units East, 2 units North'.
When writing vectors in component form, ensure the components are correctly aligned in a column. Be consistent with the order of components (e.g., x then y) throughout your calculations.
Vector addition (component form)
Used to add vectors algebraically by summing their corresponding components.
Vector subtraction (component form)
Used to subtract vectors algebraically by subtracting their corresponding components.
Scalar multiplication of a vector
Multiplies each component of a vector by a scalar value.
unit vector — A unit vector is a vector with a magnitude of 1 unit.
Unit vectors are used to specify a direction without implying any magnitude. They are often denoted by 'i' for the x-direction and 'j' for the y-direction. Any vector can be expressed as its magnitude multiplied by a unit vector in its direction. Think of a compass needle: it points in a direction (like North) but doesn't tell you how far to go; a unit vector is like that directional pointer.
To find a unit vector in the direction of a given vector, divide the vector by its magnitude. This is a common step in problems requiring directional information.
parallel vectors — Parallel vectors are vectors that have the same direction, meaning they make the same angle with a reference axis.
If two vectors are parallel, one can be expressed as a scalar multiple of the other. This property is important in physics, for example, when force and acceleration are parallel according to Newton's second law. Imagine two cars driving down a straight road in the same direction; their velocity vectors are parallel, even if one car is going faster than the other.
Students often think parallel vectors must have the same magnitude, but they only need to point in the same (or opposite) direction.
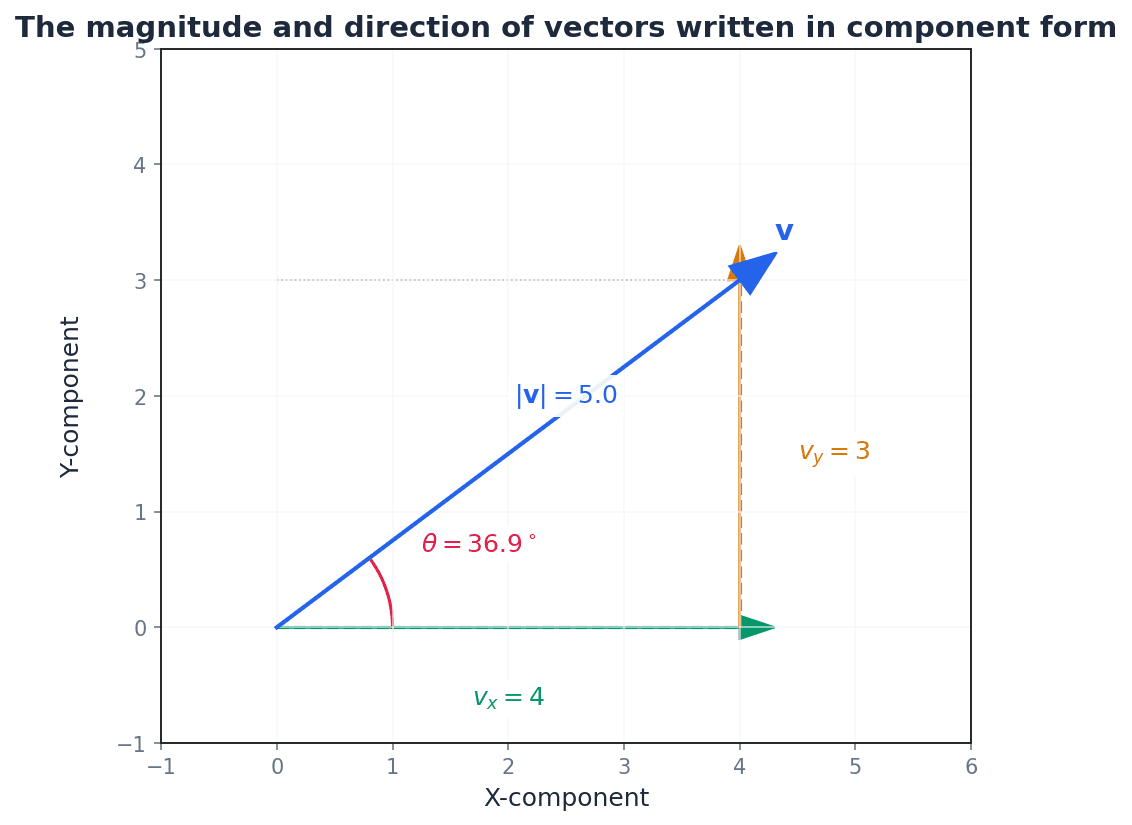
Magnitude of a vector in component form
Used to calculate the scalar magnitude of a vector given its perpendicular components.
Pythagoras' theorem for resultant magnitude
Used to find the magnitude of the resultant of two perpendicular vectors.
Direction of a vector in component form (tangent)
Used to find the angle of a vector relative to the positive x-axis. Quadrant must be considered for correct angle.
Trigonometry for resultant direction (tangent)
Used to find the direction of the resultant vector relative to one of its components.
Incorrectly determining the direction of a resultant vector, especially when components are in different quadrants, by not considering the signs of the components or the correct angle relative to the x-axis. Always draw a diagram to find the correct angle.
When a question asks for a vector quantity like force or velocity, give both magnitude and direction in your final answer.
Always draw a clear diagram for every vector problem. Use the 'head-to-tail' method for addition or right-angled triangles for components. Check if your final answer makes sense; a resultant vector's direction and magnitude should be a plausible combination of the original vectors.
Exam Technique
Adding/Subtracting Vectors Graphically
Adding/Subtracting Vectors Algebraically (Component Form)
| Mistake | Fix |
|---|---|
| Confusing speed with velocity or distance with displacement. | Remember that speed and distance are scalar (magnitude only), while velocity and displacement are vector (magnitude and direction). Always check if the quantity requires direction. |
| Incorrectly assuming the magnitude of a resultant vector is the arithmetic sum of individual magnitudes. | This is only true if vectors are in the same direction. For other cases, use vector addition methods (graphical head-to-tail or component addition) and Pythagoras' theorem for magnitude. |
| Getting the direction angle wrong, especially for vectors in different quadrants. | Always draw a diagram of the vector. Use the inverse tangent function to find a reference angle, then adjust it based on the quadrant of the vector's components to get the correct angle relative to the positive x-axis or specified reference. |
This chapter explores how to determine resultant forces using component resolution or scale diagrams, and how to apply Newton's second law in two dimensions. It also covers the conditions for equilibrium, where the resultant force is zero, introducing the triangle of forces and Lami's theorem for three concurrent forces.
resultant force — The single force that has the same effect as all the individual forces acting on an object.
When multiple forces act on an object, they can be combined into one equivalent force, the resultant force. This force determines the object's acceleration according to Newton's second law. Imagine several people pushing a box in different directions; the resultant force is like one person pushing the box with the combined effect of all those pushes.
Students often think the resultant force is always in the direction of the largest individual force, but actually it's the vector sum of all forces.
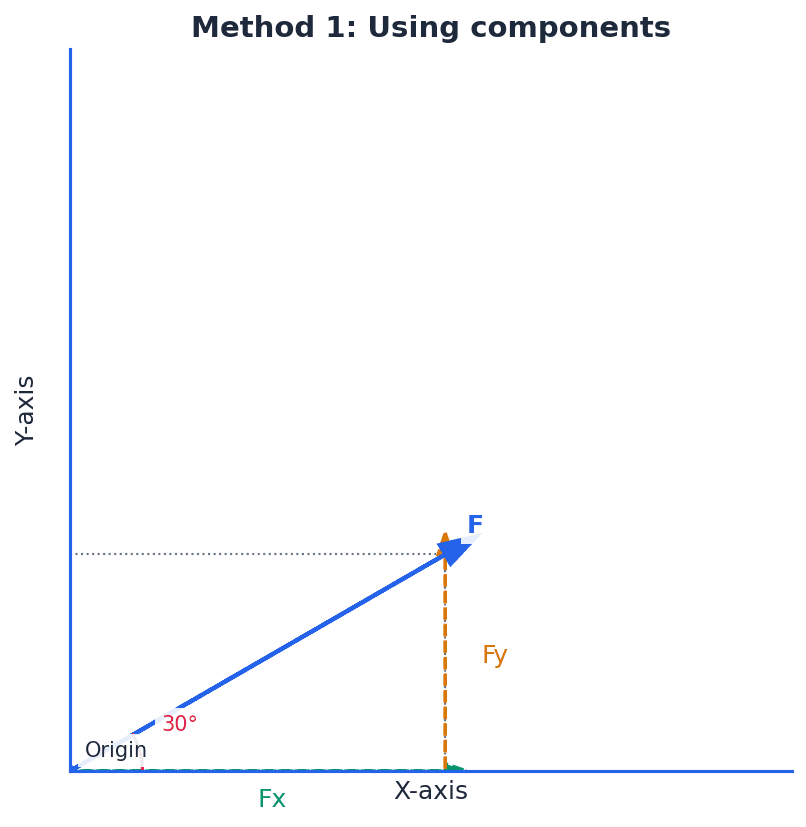
components — The parts of a vector that lie along specified perpendicular directions, typically horizontal and vertical or parallel and perpendicular to a surface.
Resolving a force into its components simplifies calculations by allowing vector addition to be performed algebraically along each axis. This is particularly useful for forces on inclined planes. Imagine pushing a heavy box diagonally; the components are like one person pushing it purely forwards and another person pushing it purely sideways.
Students often confuse sine and cosine when resolving components, using the wrong trigonometric function for the adjacent or opposite side of the angle. Remember that cosine is used for the component adjacent to the angle, and sine for the component opposite the angle.
acceleration — The rate of change of velocity of an object.
Acceleration is a vector quantity, meaning it has both magnitude and direction. According to Newton's second law, it is directly proportional to the resultant force and inversely proportional to the mass of the object. When you press the accelerator pedal in a car, you are causing the car to accelerate, changing its speed or direction.
Students often confuse acceleration with speed, but actually acceleration is the rate at which speed *changes*, or the rate at which direction changes.
Newton's Second Law (vector form)
Applies when forces are not in equilibrium, causing acceleration. F and a are vectors.
Newton's Second Law (component form)
Used for resolving forces and acceleration into perpendicular components.
The resultant force is the single force that has the same effect as all individual forces acting on an object. It can be calculated using component resolution, where forces are broken down into perpendicular components (e.g., horizontal and vertical). Alternatively, scale diagrams can be used for graphical determination. Once the resultant force is found, Newton's second law, F=ma, can be applied in two dimensions by resolving forces and acceleration into their respective components.
When asked to 'find the resultant force', remember to state both its magnitude and direction, as it is a vector quantity.
When calculating acceleration using F=ma, ensure that F is the *resultant* force in the direction of acceleration, and that units are consistent (Newtons, kilograms, m s⁻²).
equilibrium — A state where the resultant force acting on an object is zero, meaning the object is either at rest or moving with constant velocity.
In equilibrium, all forces acting on an object balance each other out. This implies that the sum of force components in any perpendicular direction is zero. A tug-of-war where both teams pull with equal and opposite force, so the rope doesn't move, is an example of equilibrium.
Students often think equilibrium means the object is stationary, but actually it also includes objects moving at a constant velocity.
For equilibrium problems, explicitly state 'resultant force = 0' or 'sum of forces in x-direction = 0' and 'sum of forces in y-direction = 0' to show understanding.
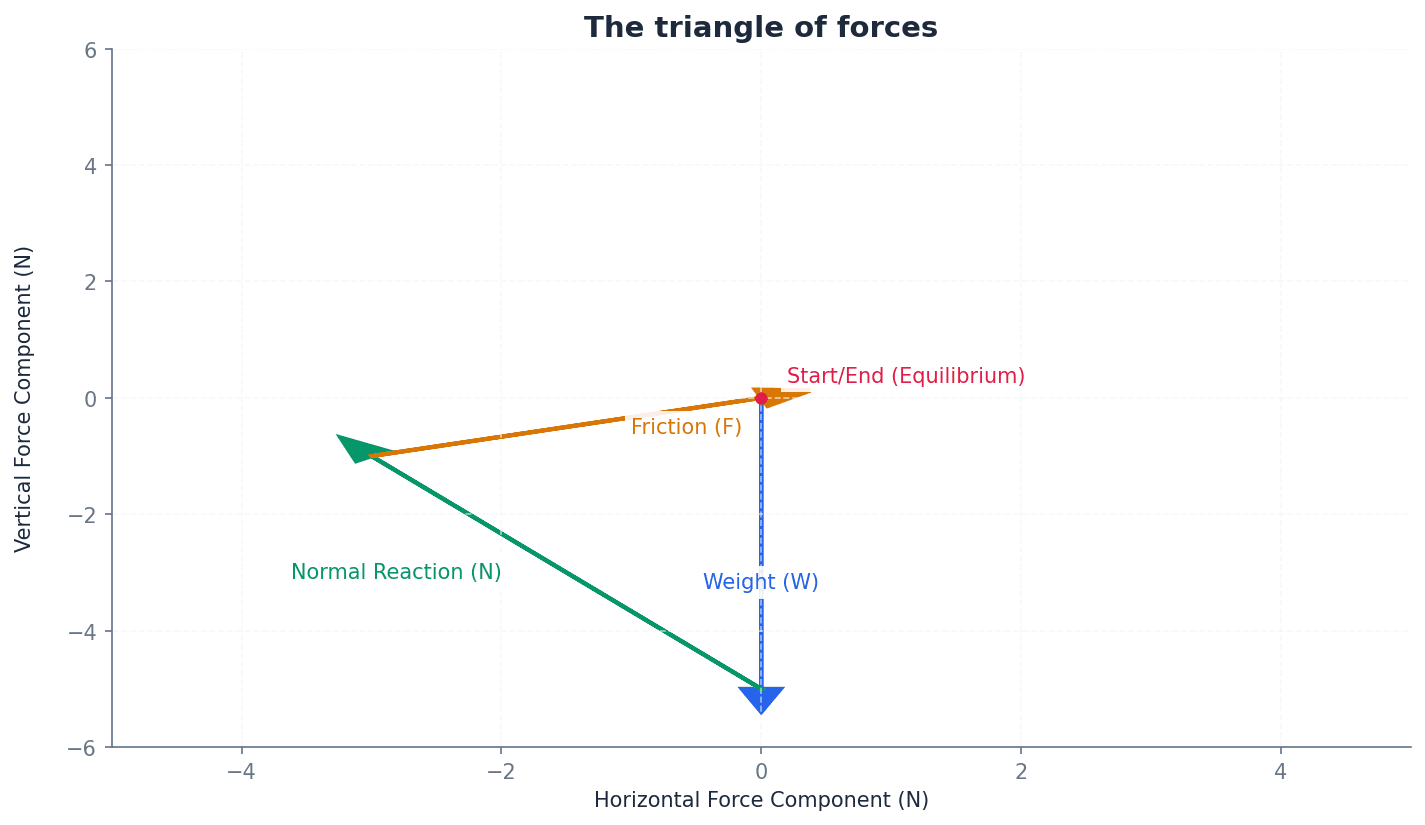
triangle of forces — A theorem stating that if a body is in equilibrium under the action of three non-parallel forces, these forces can be represented in magnitude and direction by the sides of a closed triangle.
This theorem provides a graphical method for solving equilibrium problems with three forces. The forces must also have lines of action that pass through the same point (be concurrent). If three people are pulling on a ring and it stays still, their pulling forces, when drawn head-to-tail, would form a closed triangle.
Students often forget that for the triangle of forces, the forces must be 'taken in order' (head-to-tail) to form a closed triangle for equilibrium, and that the lines of action must be concurrent.
Lami’s theorem — A theorem stating that when three forces acting at a point are in equilibrium, each force is proportional to the sine of the angle between the other two forces.
Lami's theorem is a specific application of the sine rule to the triangle of forces, providing a mathematical shortcut for solving equilibrium problems involving three concurrent forces. It's like a special rule for a three-way tug-of-war where the forces are balanced, relating the strength of each pull to the angles between the other two pulls.
Lami's Theorem
Applies only when three concurrent forces are in equilibrium. Angles are between the *other two* forces.
Students often use the angles within the force triangle instead of the angles between the forces in the original setup when applying Lami's theorem. Remember that Lami's theorem uses the angles between the forces themselves.
Clearly identify the angles between the forces (α, β, γ) in the original force diagram before applying Lami's theorem to avoid using incorrect angles.
weight — The force of gravity acting on an object, directed towards the center of the Earth.
Weight is a force, measured in Newtons, and is calculated as mass × gravitational acceleration (W = mg). It always acts vertically downwards. Your weight is the force that pulls you down towards the ground, which is why you feel heavier on Earth than on the Moon.
Students often confuse weight and mass, treating them as interchangeable quantities rather than distinct concepts (force vs. amount of matter).
Always represent weight as a vector acting vertically downwards from the center of mass of the object in force diagrams.
normal reaction — The force exerted by a surface on an object in contact with it, acting perpendicular to the surface.
This force prevents an object from passing through a surface. Its magnitude adjusts to balance other forces perpendicular to the surface, such as a component of weight on an incline. When you stand on the floor, the floor pushes up on you with a normal reaction force, preventing you from falling through it.
Students often think normal reaction is always equal to the object's weight, but actually it's only equal to the component of weight perpendicular to the surface, or other forces perpendicular to the surface.
Always draw the normal reaction force perpendicular to the surface of contact in force diagrams, especially on inclined planes.
tension — The pulling force transmitted axially by a string, cable, chain, or similar one-dimensional continuous object.
Tension acts along the length of the string or rope and is always a pulling force. In ideal situations (light, inextensible strings over smooth pulleys), the tension is uniform throughout the string. When you pull a toy with a string, the string exerts a tension force on the toy, pulling it along.
Students often think tension is always equal to the weight it supports, but actually it depends on the acceleration of the system and other forces acting.
Remember that tension acts away from the object along the line of the string. If pulleys are smooth, tension is constant along the string.
friction force — A force that opposes relative motion or tendency of motion between two surfaces in contact.
Friction acts parallel to the surfaces in contact and its direction is always opposite to the direction of motion or impending motion. It can be static (preventing motion) or kinetic (opposing motion). When you try to slide a book across a table, the friction force is what makes it slow down and stop.
Students often think friction always opposes the applied force, but actually it opposes the *relative motion* or *tendency of relative motion* between surfaces.
Always indicate the direction of friction correctly in your force diagrams, opposing the motion or the direction an object would slide if there were no friction.
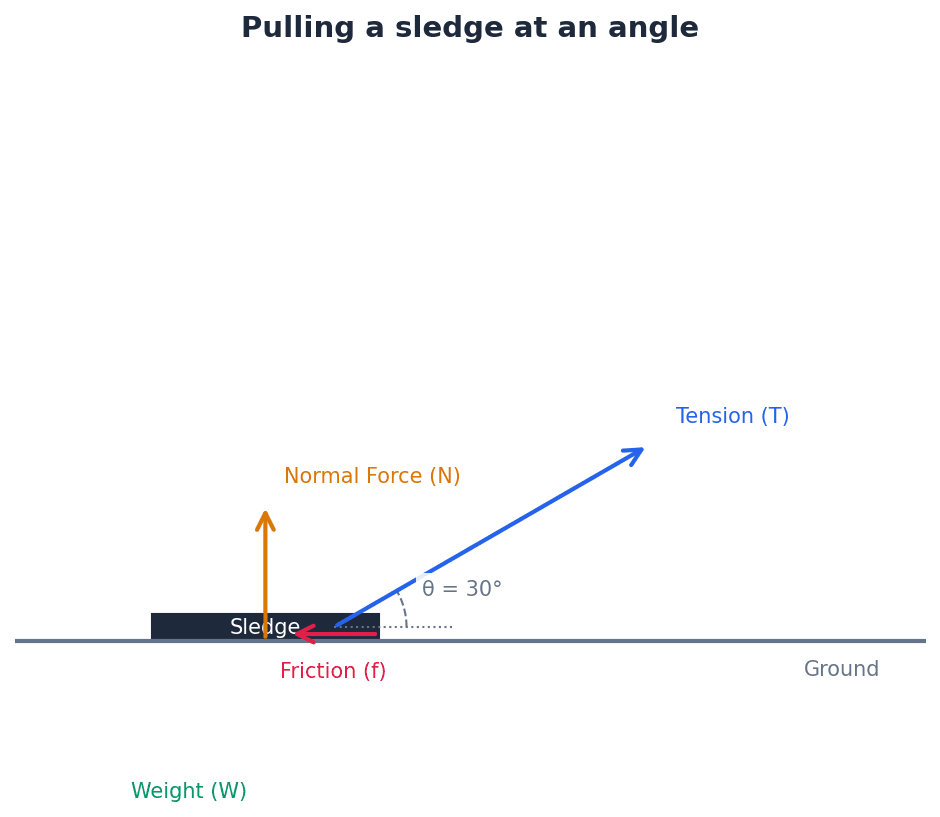
When dealing with objects on inclined planes, it is crucial to resolve forces parallel and perpendicular to the plane. This approach simplifies problem-solving by aligning one axis with the direction of potential motion. The weight of the object (mg) will have components mg sin(θ) parallel to the plane and mg cos(θ) perpendicular to the plane, where θ is the angle of inclination.
For inclined plane problems, resolve forces parallel and perpendicular to the plane. This usually makes one component of acceleration zero.
Always draw a large, clear force diagram for every problem. Label all forces (Weight, Tension, Normal Reaction, Friction).
If a problem involves exactly three forces in equilibrium, consider using the Triangle of Forces or Lami's Theorem as a quicker alternative to resolving.
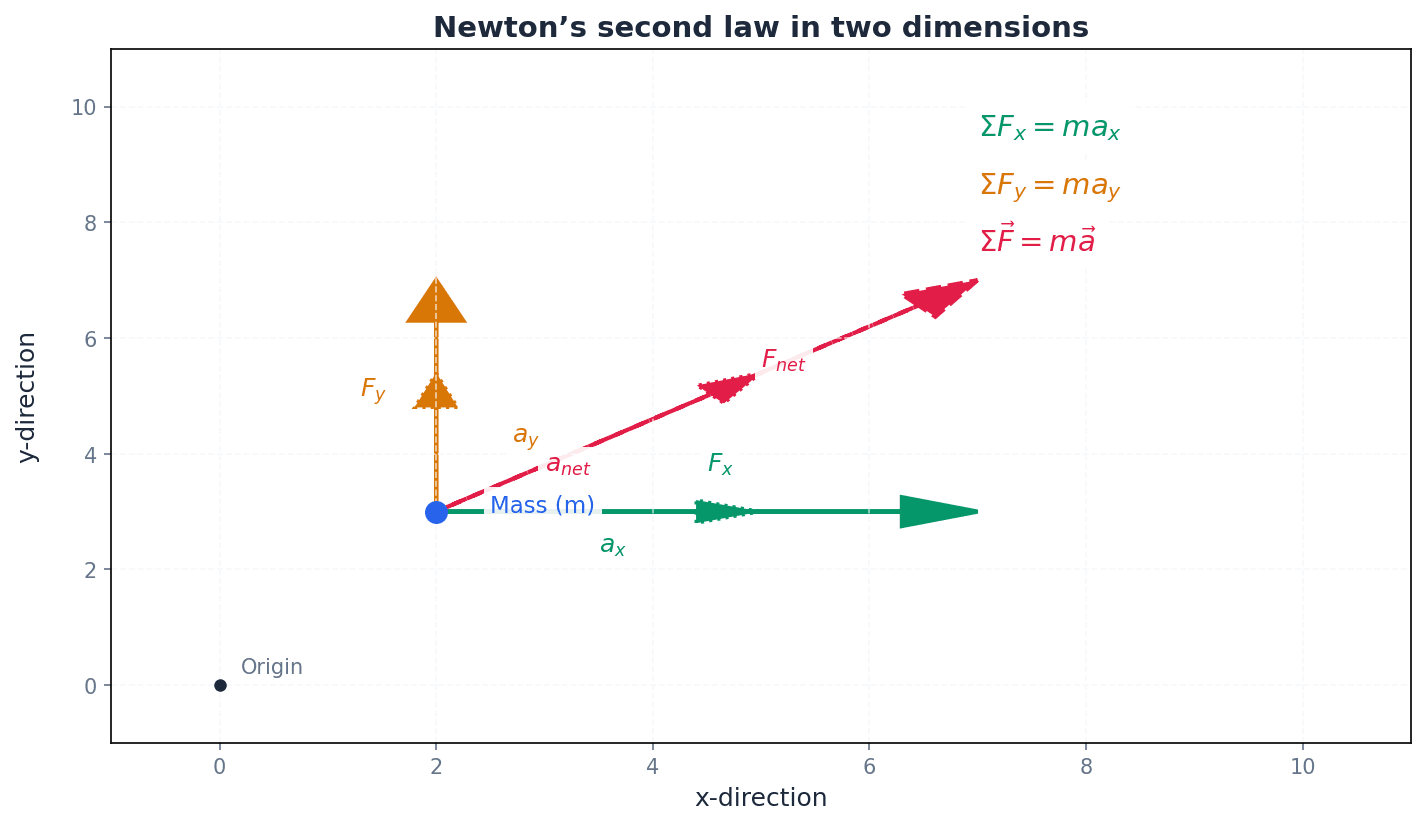
When using F=ma in 2D, resolve forces and acceleration into perpendicular components and apply the formula separately for each direction (e.g., ΣF_x = ma_x and ΣF_y = ma_y).
Exam Technique
Finding resultant forces using components
Solving problems with forces in equilibrium
| Mistake | Fix |
|---|---|
| Assuming Normal Reaction always equals Weight (mg). | Remember that normal reaction only equals the component of weight perpendicular to the surface, or other forces perpendicular to the surface. Always resolve forces perpendicular to the surface to find the true normal reaction. |
| Confusing sine and cosine when resolving forces. | The component adjacent to the angle uses cosine, while the component opposite the angle uses sine. Draw a right-angled triangle to visualise if unsure. |
| Thinking equilibrium only means 'stationary'. | Equilibrium means the resultant force is zero, which includes objects moving at a constant velocity as well as those at rest. |
This chapter extends the study of motion in a straight line to include variable acceleration, moving beyond constant acceleration models. It introduces the use of differentiation to find velocity and acceleration, and conversely, integration to find velocity and displacement. The importance of initial conditions for determining constants of integration is highlighted.
displacement — Displacement is the change in position of an object.
It is a vector quantity, representing the straight-line distance and direction from the starting point to the ending point. For example, if you walk 5 meters forward and then 3 meters backward, your displacement is 2 meters forward from your starting point.
Students often confuse distance travelled with displacement, but actually displacement is the net change in position (a vector), while distance is the total path length (a scalar).
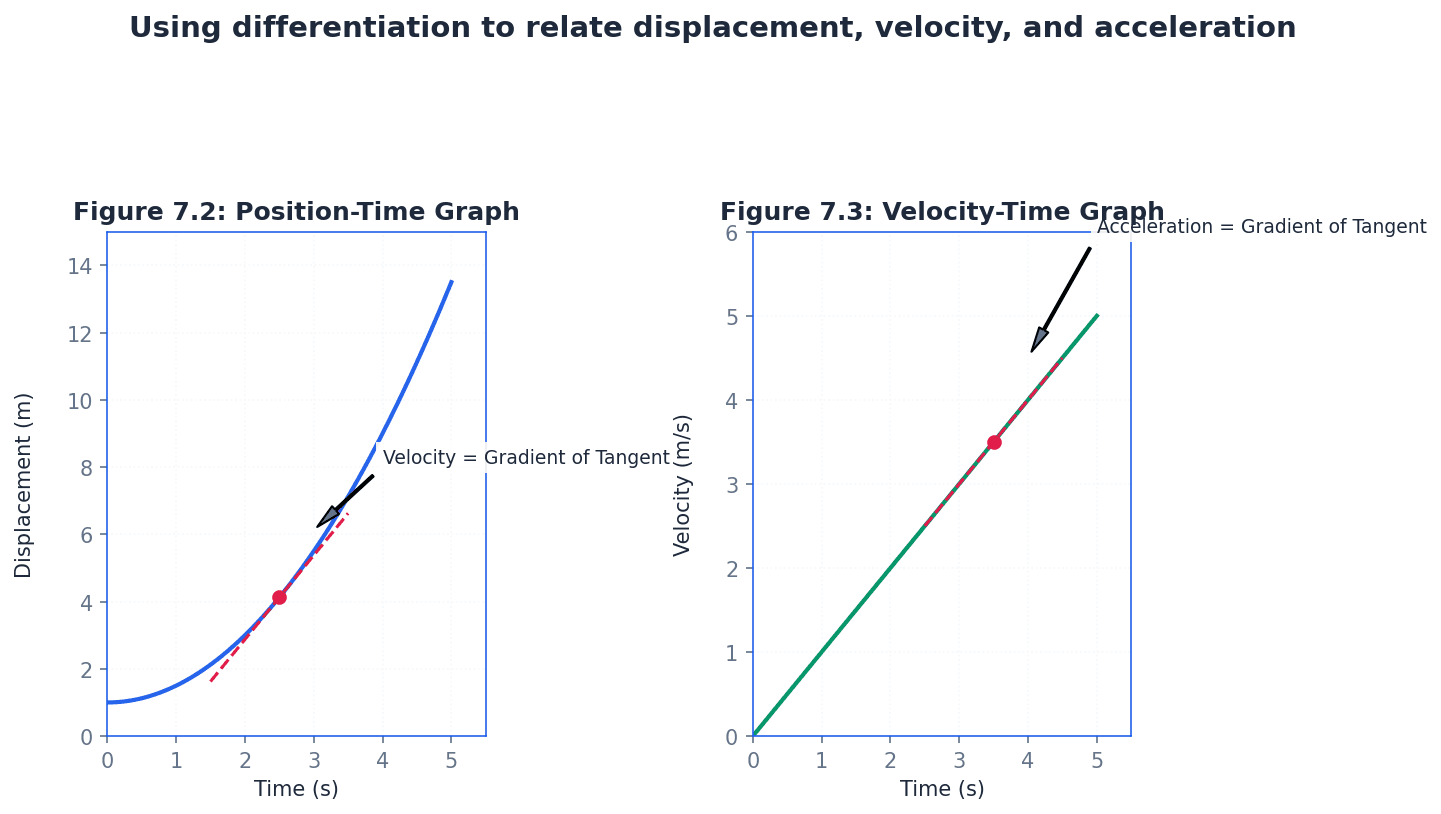
velocity — The velocity of an object is the rate at which its position changes with time.
Velocity is a vector quantity, indicating both speed and direction. When velocity is not constant, the position-time graph is a curve, and the velocity at any instant is given by the gradient of the tangent to this curve. Imagine a car's speedometer tells you its speed, but the velocity also tells you if it's going north or south.
When asked to 'find velocity', ensure your answer includes both magnitude and direction (e.g., positive or negative sign for straight-line motion), not just speed.
Students often think velocity is just speed, but actually velocity includes both magnitude (speed) and direction.
acceleration — Acceleration is the rate at which the velocity changes.
Acceleration is a vector quantity. When acceleration is not constant, the velocity-time graph is a curve, and the acceleration at any instant is given by the gradient of the tangent to this curve. If you press the accelerator pedal in a car, you're changing its velocity, which means you're accelerating.
Students often think acceleration only means speeding up, but actually acceleration also includes slowing down (deceleration) or changing direction.
Be careful with the sign of acceleration; a negative acceleration can mean slowing down in the positive direction or speeding up in the negative direction.
This chapter extends the study of motion in a straight line to include scenarios where acceleration is not constant. Unlike constant acceleration models, which rely on the suvat equations, variable acceleration requires the use of calculus to describe and analyze motion. This allows for a more comprehensive understanding of complex motion scenarios.
Students often think the constant acceleration formulae (suvat equations) apply to all motion, but actually they only apply when acceleration is constant.
For general motion in a straight line, the relationships between position, velocity, and acceleration are defined by differentiation. Velocity is the instantaneous rate of change of position with respect to time, and acceleration is the instantaneous rate of change of velocity with respect to time. These calculus techniques are fundamental for analyzing motion with variable acceleration.
Velocity from position
Used to find instantaneous velocity when position is given as a function of time. Applies to variable acceleration.
Acceleration from velocity
Used to find instantaneous acceleration when velocity is given as a function of time. Applies to variable acceleration.
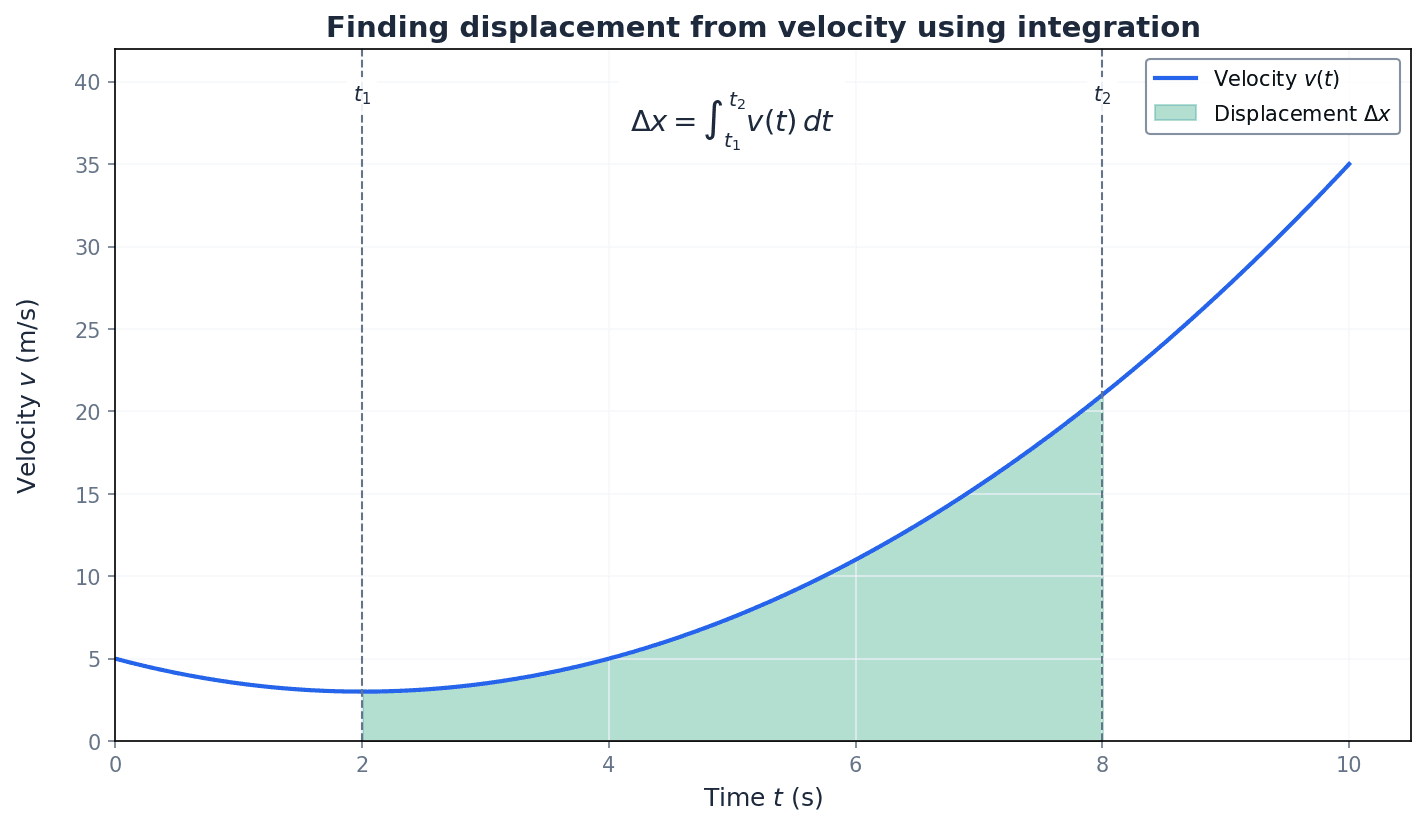
Conversely, integration is used to determine velocity from acceleration and displacement from velocity. When integrating, it is crucial to include the constant of integration, which is determined by the initial conditions of the motion. This allows for the complete description of the particle's motion from its acceleration or velocity function.
Velocity from acceleration
Used to find velocity when acceleration is given as a function of time. Remember to include the constant of integration.
Displacement from velocity
Used to find displacement when velocity is given as a function of time. Remember to include the constant of integration.
Students often forget the constant of integration when finding displacement from velocity or velocity from acceleration, but actually it is crucial and determined by initial conditions.
When you integrate, immediately write '+ C'. Then, re-read the question to find the initial conditions (e.g., 'starts from rest at the origin') to calculate the value of C.
Displacement between two times
Used to find the displacement (area under the velocity-time graph) between specific time limits.
If a question asks for displacement *between* two times, using a definite integral is often the most efficient method and avoids needing to find C.
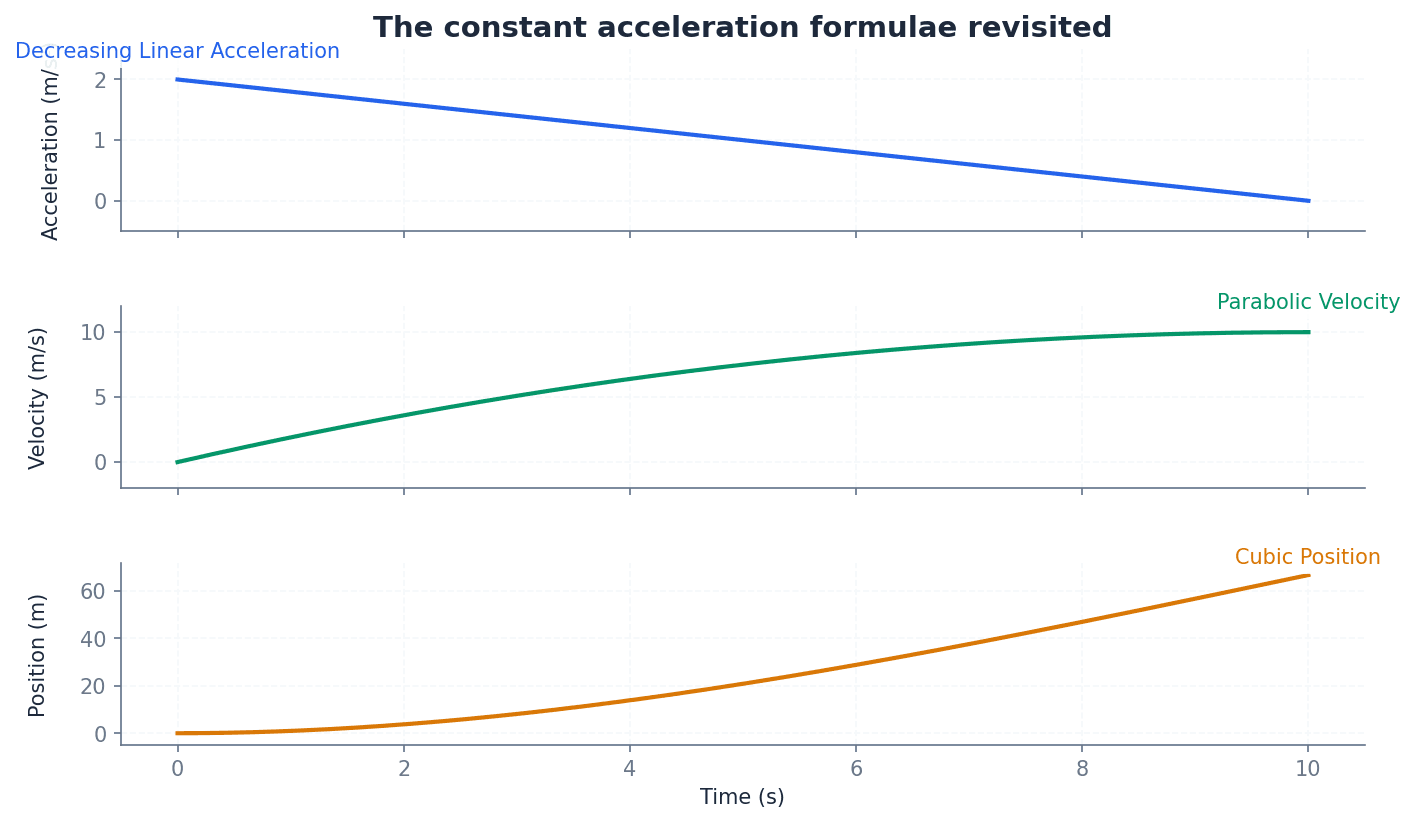
The constant acceleration formulae, often referred to as suvat equations, are special cases derived by integrating constant acceleration. It is vital to remember that these formulae are only applicable when acceleration is constant. For any scenario involving variable acceleration, calculus methods must be employed.
Constant acceleration formula (v)
Applies only when acceleration is constant. Derived by integrating constant acceleration.
Constant acceleration formula (s)
Applies only when acceleration is constant. Derived by integrating the velocity equation for constant acceleration.
Always check if acceleration is constant or variable first. If the expression for 'a' contains 't', you must use calculus.
To find the total distance travelled, find any times when velocity `v=0`. This indicates a change in direction. Integrate the sections of the journey separately and add the magnitudes of the displacements.
Exam Technique
Finding velocity and acceleration from position
Finding displacement from velocity
| Mistake | Fix |
|---|---|
| Using constant acceleration (suvat) formulae when acceleration is variable. | Always check if acceleration is constant or a function of time. If it's a function of time, calculus (differentiation and integration) must be used. |
| Forgetting to include the constant of integration ('+ C') when integrating. | Immediately write '+ C' after performing an indefinite integral. Then, use the given initial conditions (e.g., initial velocity, initial position) to solve for C. |
| Confusing displacement with total distance travelled. | Displacement is the net change in position (a vector), while total distance is the sum of all path lengths (a scalar). If an object changes direction, total distance requires integrating absolute velocity or summing magnitudes of displacements over segments. |
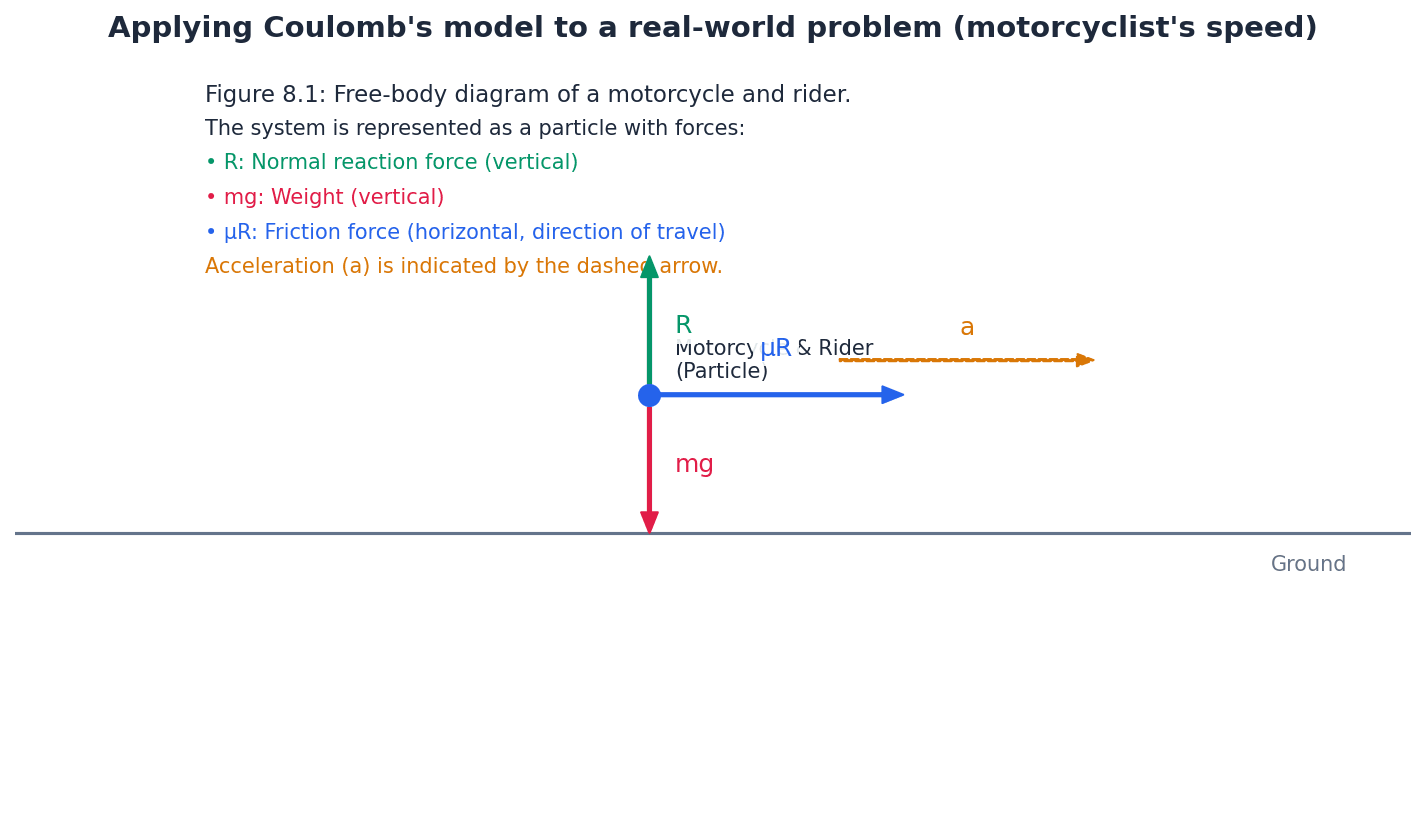
This chapter introduces Coulomb's model for friction, defining its key laws and the concept of the coefficient of friction. It demonstrates how to apply these principles to solve problems involving objects on rough horizontal and inclined surfaces, including scenarios of limiting equilibrium and dynamic systems.
Friction — Friction always opposes relative motion between two surfaces in contact.
It is a force that acts parallel to the surfaces in contact, preventing or opposing sliding. Its magnitude depends on the normal reaction and the roughness of the surfaces. Imagine trying to push a heavy box across a rough floor; the resistance you feel is friction. If you try to push it on ice, the resistance is much less.
Normal reaction — The normal reaction is the force exerted by a surface on an object in contact with it, acting perpendicular to the surface.
This force balances the component of the object's weight (and any other external forces) that is perpendicular to the surface. It is crucial for calculating the maximum frictional force. When you stand on the ground, the ground pushes back up on your feet. That upward push is the normal reaction force.
Coefficient of friction — The coefficient of friction (µ) is a constant for any pair of surfaces that quantifies their roughness.
It is a dimensionless quantity that relates the maximum frictional force to the normal reaction force. A higher value of µ indicates rougher surfaces and thus greater friction. Think of it like a 'stickiness factor' between two surfaces. A high coefficient means they stick together more, making it harder to slide them past each other.
Smooth — Surfaces are described as smooth when the frictional force between them is ignored due to its very small magnitude.
In physics problems, 'smooth' is an idealisation used to simplify calculations by assuming µ = 0. This means there is no resistance to relative motion between the surfaces. Imagine a perfectly polished, frictionless ice rink. Anything on it would slide indefinitely without slowing down due to friction.
If a surface is described as 'smooth', set the frictional force (F) to zero in your equations of motion.
Rough — Surfaces are described as rough when frictional forces cannot be ignored and Coulomb's law is used to model them.
This term indicates that the coefficient of friction (µ) is non-zero, and therefore, frictional forces must be included in the force analysis and calculations. A sandpaper surface is rough; it provides significant resistance when you try to slide something across it.
When a surface is described as 'rough', always include a frictional force (F) in your force diagrams and calculations, using F ≤ µR or F = µR as appropriate.
Frictional force (no sliding)
Used when there is no sliding between surfaces, including when an object is at rest or in limiting equilibrium.
Frictional force (limiting equilibrium or sliding)
Used when sliding is just about to occur (limiting equilibrium) or when sliding is actually occurring.
Students often think F = µR always applies, but it only applies when sliding is occurring or is just about to occur (limiting equilibrium); otherwise, F < µR.
Coulomb's model for friction outlines key laws governing frictional forces. Friction always opposes relative motion between two surfaces in contact, acting parallel to the surfaces. Its magnitude depends on the normal reaction and the roughness of the surfaces, quantified by the coefficient of friction (µ). This model is applied to solve problems involving objects on rough horizontal and inclined surfaces, including calculating initial speeds from skid marks and determining forces in equilibrium or acceleration in dynamic systems.
When drawing force diagrams, ensure the frictional force arrow is always drawn parallel to the surface and in the direction opposite to the impending or actual motion.
Students often think friction always opposes motion, but it opposes *relative* motion or the tendency of relative motion between surfaces.
Newton's Second Law (perpendicular to road)
Applies when there is no vertical acceleration on a horizontal surface.
Newton's Second Law (parallel to road)
Applies when friction is the only force causing acceleration (or deceleration) parallel to the surface.
Always resolve forces perpendicular to the surface to find the normal reaction (R) before calculating frictional forces, especially on inclined planes or when external forces have vertical components.
Students often think the normal reaction is always equal to the object's weight (mg), but it only equals mg on a horizontal surface with no other vertical forces; on an incline or with other vertical forces, it's different.
When analysing forces on objects, it is crucial to resolve forces both parallel and perpendicular to the surface. The normal reaction (R) is found by considering equilibrium or acceleration perpendicular to the surface. This value of R is then used to determine the frictional force. For objects on inclined planes, the weight (mg) must be resolved into components parallel (mg sin α) and perpendicular (mg cos α) to the slope.
Limiting equilibrium — Limiting equilibrium occurs when sliding is just about to occur, and the frictional force reaches its maximum possible value, F = µR.
This is the threshold state between an object being at rest and starting to slide. Any force exceeding the limiting friction will cause the object to accelerate. Imagine pushing a heavy sofa. You push harder and harder, but it doesn't move. The moment it's 'just about to move' is limiting equilibrium; if you push any harder, it slides.
When a problem states an object is 'on the point of slipping' or 'just about to move', it signals that you should use F = µR in your calculations.
Angle of friction — The angle of friction (λ) is the angle for which an object on an inclined plane is just about to slide down, defined by tan λ = µ.
At this specific angle, the component of gravity parallel to the slope is exactly balanced by the maximum static frictional force. If the slope angle exceeds the angle of friction, the object will slide. Imagine tilting a book with a coin on it. The angle at which the coin just begins to slide is the angle of friction for the coin and book surfaces.
Angle of friction
Relates the coefficient of friction to the angle of an inclined plane at which an object is on the point of sliding or moves at constant speed.
Students often think the angle of friction is the angle at which an object *always* slides, but it's the angle at which it's *on the point of sliding* or slides at constant velocity if already in motion.
Recognise that problems asking for the angle at which an object 'just begins to slide' or 'moves at constant speed' on an incline are directly testing the concept of the angle of friction, where tan α = µ.
Constant acceleration equation
Used to calculate final velocity, initial velocity, acceleration, or displacement when acceleration is constant.
Solving problems involving friction requires careful application of Newton's Second Law and Coulomb's laws of friction. This often involves drawing clear force diagrams, resolving forces into components parallel and perpendicular to the surface, and correctly identifying whether the object is at rest, in limiting equilibrium, or accelerating. For dynamic systems, equations of motion for each mass are combined to find acceleration and tensions.
Always draw a large, clear force diagram. Label weight (mg), normal reaction (R), friction (F), and any applied forces (like tension or pushes).
Carefully read the question for keywords. 'Limiting equilibrium' or 'about to slide' means F = µR. 'Accelerating' or 'sliding' also means F = µR, but you will use F_net = ma.
Exam Technique
Calculating maximum force without movement (limiting equilibrium)
Analysing systems with multiple blocks and pulleys (dynamic systems)
| Mistake | Fix |
|---|---|
| Using F = µR when an object is in equilibrium but not on the point of moving. | Remember that F = µR only applies when sliding is occurring or is just about to occur (limiting equilibrium). Otherwise, the frictional force F is just enough to balance the applied forces, so F < µR. |
| Assuming the normal reaction R is always equal to the weight mg. | The normal reaction R is perpendicular to the surface. On an incline, R = mg cos θ. If there are other vertical force components (e.g., pulling a sledge at an angle), these must be included in the vertical force balance to find R. |
| Forgetting that friction opposes the *tendency* of motion, not always the direction of an applied force. | Always consider which way the object *would* move if there were no friction, or which way it is currently sliding. Friction acts in the opposite direction to this relative motion or tendency of motion. |
This chapter introduces the fundamental concepts of energy, work, and power in mechanics. It defines kinetic and potential energy, establishes the work-energy principle, and differentiates between conservative and dissipative forces. These concepts are essential for analyzing motion and energy transformations.
Kinetic energy — Kinetic energy is the energy which a body possesses because of its motion.
It is a scalar quantity, meaning it only has magnitude, and its value depends on both the mass and the square of the speed of the object. When a force acts on a body, its kinetic energy is liable to change. Imagine a bowling ball rolling down an alley; the faster it rolls, the more kinetic energy it has.
Students often confuse kinetic energy (scalar) with momentum (vector). Remember that kinetic energy is a scalar quantity with magnitude only, unlike momentum which is a vector.
When calculating kinetic energy, ensure you use the speed (magnitude of velocity) and remember to square it. Pay attention to units, as mass should be in kg and speed in m/s for joules.
Potential energy — Potential energy is the energy which a body possesses because of its position.
It can be thought of as stored energy that has the potential to be converted into kinetic or other forms of energy. A stretched rubber band or a ball held high above the ground both have potential energy, which converts to kinetic energy when released.
Gravitational potential energy — The gravitational potential energy of the object of mass m kg at height h m above a fixed reference level, 0, is mgh J.
It represents the work done against the force of gravity to raise the body to that height. A loss in gravitational potential energy is equivalent to the work done by the force of gravity. A roller coaster at the top of a hill has a lot of gravitational potential energy, which converts to kinetic energy as it descends.
Students often think potential energy is only gravitational, but it can also be stored in other forms like elastic potential energy. Also, gravitational potential energy is always relative to a chosen reference level, not an absolute value.
Always define your reference level for potential energy calculations. A common error is forgetting that potential energy is relative to a chosen zero point.
Work done by a constant force — The work done by a constant force = force × distance moved in the direction of the force.
Work is only done when there is movement, and only the component of the force in the direction of motion contributes to the work. If a force is perpendicular to the direction of motion, it does no work. If you push a heavy box across a room, you are doing work, but if you just hold it stationary, you are not doing work in the physics sense.
Students often think exerting a force always means doing work, but work is only done if there is movement in the direction of the force.
When a force acts at an angle, remember to use the component of the force parallel to the displacement (F cos θ). Negative work is done if the force opposes the motion.
Power — Power is the rate at which work is being done.
It quantifies how quickly energy is transferred or transformed. A powerful engine can do a large amount of work in a short period of time. It can also be expressed as the product of force and velocity. Two people lifting the same box to the same height, but one doing it faster, means the faster person is more powerful.
Students often confuse power (rate of doing work) with work (energy transferred). Remember that power is the rate of energy transfer, while work is the total energy transferred.
Watt — The unit of power is the watt (W), named after James Watt.
One watt is defined as one joule of work done per second (1 J/s). It also corresponds to the power produced by a force of 1 N acting on an object moving at 1 m/s. A 100 W light bulb uses energy at a faster rate than a 60 W bulb.
Kinetic energy
Energy due to motion; scalar quantity. 'm' is mass in kg, 'v' is speed in m/s, 'K.E.' is kinetic energy in J.
Momentum
Vector quantity in the same direction as velocity. 'm' is mass in kg, 'v' is velocity in m/s, 'p' is momentum in kg m/s.
Work done by a constant force
Only the component of force in the direction of motion does work. 'F' is force in N, 's' is distance moved in the direction of the force in m, 'W' is work done in J.
Work done by a force at an angle
Equivalent to (component of F along s) × s. 'F' is force in N, 's' is distance moved in m, 'θ' is the angle between force and direction of motion, 'W' is work done in J.
Gravitational potential energy
Energy due to position in a gravitational field; relative to a chosen reference level. 'm' is mass in kg, 'g' is acceleration due to gravity in m/s², 'h' is height above reference level in m, 'P.E.' is gravitational potential energy in J.
Power
Rate of doing work; F and v must be in the same direction. Fv gives instantaneous power. 'P' is power in W, 'W' is work done in J, 't' is time in s, 'F' is force in N, 'v' is speed in m/s.
The work-energy principle establishes a direct link between the total work done by all forces acting on a body and its change in kinetic energy. This principle states that the total work done by the forces acting on a body is equal to the increase in the kinetic energy of the body. It is a powerful tool for solving problems, especially when acceleration is not constant, as it allows us to relate forces and distances to changes in motion.
Work-energy principle
The total work done by all forces equals the increase in kinetic energy. 'm' is mass in kg, 'u' is initial speed in m/s, 'v' is final speed in m/s, 'W_total' is total work done by all forces in J, 'ΔK.E.' is change in kinetic energy in J.
Students often forget to include all forces acting on a body when applying the work-energy principle, especially resistive forces. Remember that the principle refers to the total work done by *all* forces acting on the body.
Be careful to include all forces acting on the body when calculating the total work done. Remember that resistive forces do negative work, reducing kinetic energy.
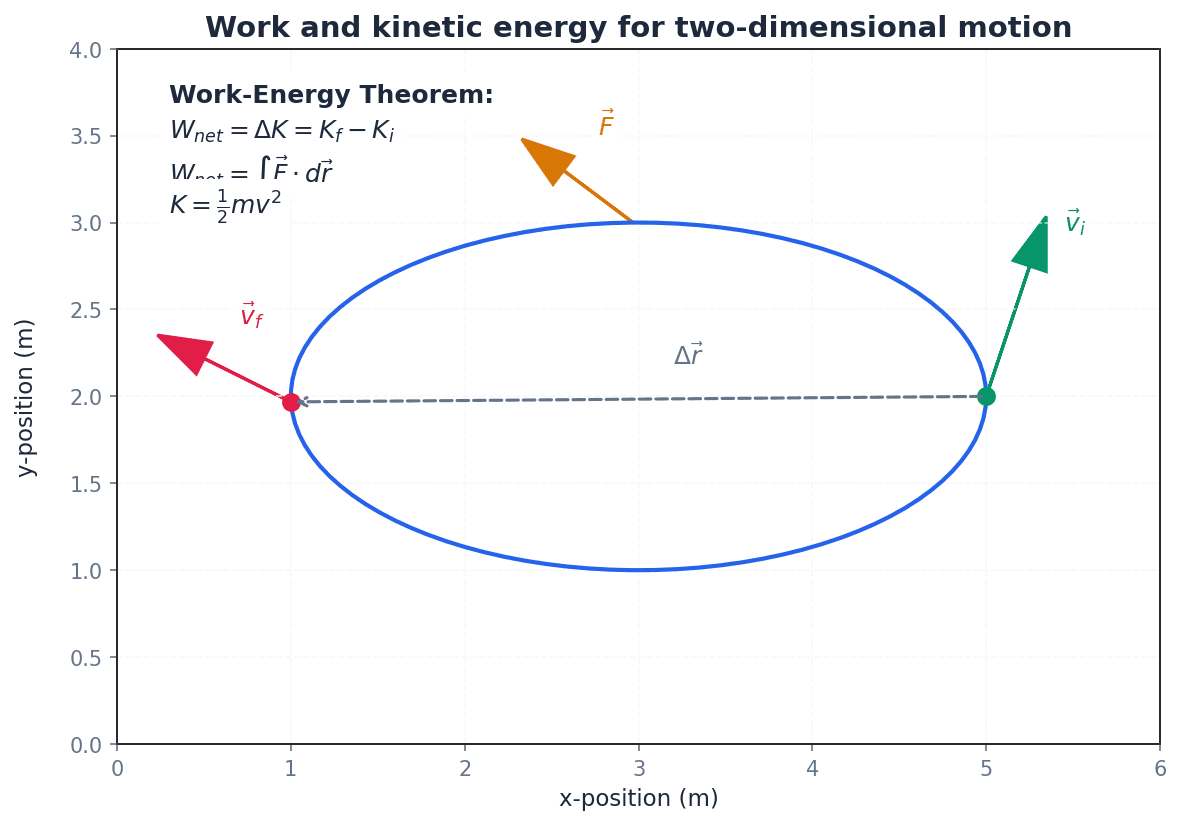
Forces can be categorised based on how they affect mechanical energy. Conservative forces, such as gravity, conserve mechanical energy, meaning the work done is independent of the path taken. In contrast, dissipative forces, like friction and air resistance, convert mechanical energy into non-mechanical forms, primarily heat and sound, leading to a 'loss' of mechanical energy from the system.
Conservative forces — Forces which conserve mechanical energy are called conservative forces.
For these forces, the work done in moving an object between two points is independent of the path taken, and the mechanical energy (kinetic + potential) of the system remains constant if only conservative forces do work. Lifting a book to a shelf gives it gravitational potential energy, which converts back to kinetic energy if it falls, conserving energy within the mechanical system.
Students often think 'conservative' means the force is small or negligible, but it actually refers to the property that mechanical energy is conserved when only these forces are acting.
Dissipative forces — Forces such as friction which result in the dissipation of mechanical energy are called dissipative forces.
These forces convert mechanical energy into non-mechanical forms, primarily heat and sound, meaning the mechanical energy is not conserved. Air resistance is another common example. When you rub your hands together, friction converts mechanical energy into heat, warming your hands.
Students often think energy is 'lost' with dissipative forces, but actually total energy is conserved; it's just converted into other forms like heat and sound, making it 'lost' from the mechanical system.
In problems involving dissipative forces, the work done by these forces will be negative and must be accounted for in the work-energy principle, as it reduces the mechanical energy of the system.
When only conservative forces are doing work, the total mechanical energy of a system (the sum of kinetic and potential energy) remains constant. This means that any gain in kinetic energy is directly balanced by a loss in potential energy, and vice versa. This principle simplifies problem-solving by allowing direct comparison of initial and final mechanical energy states.
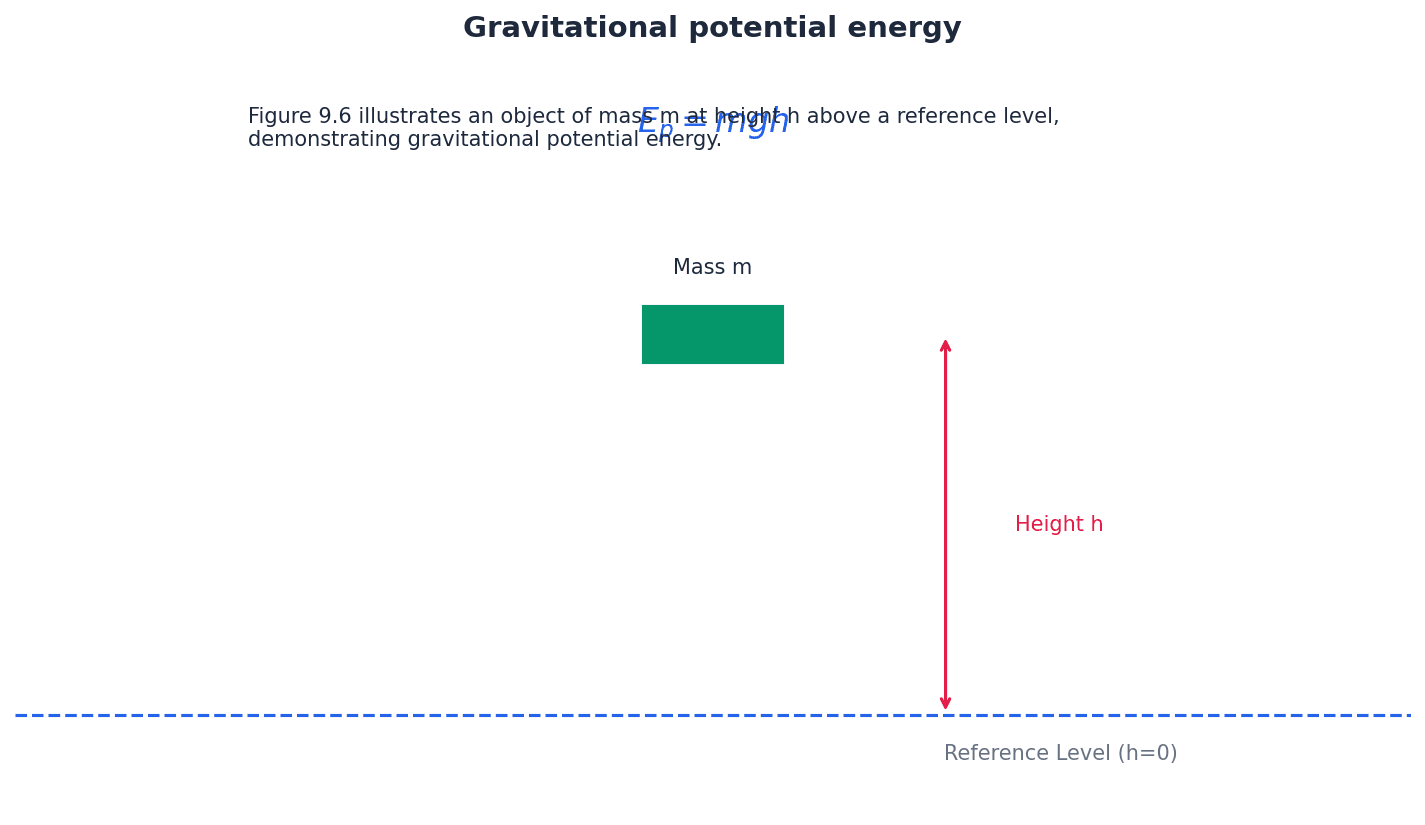
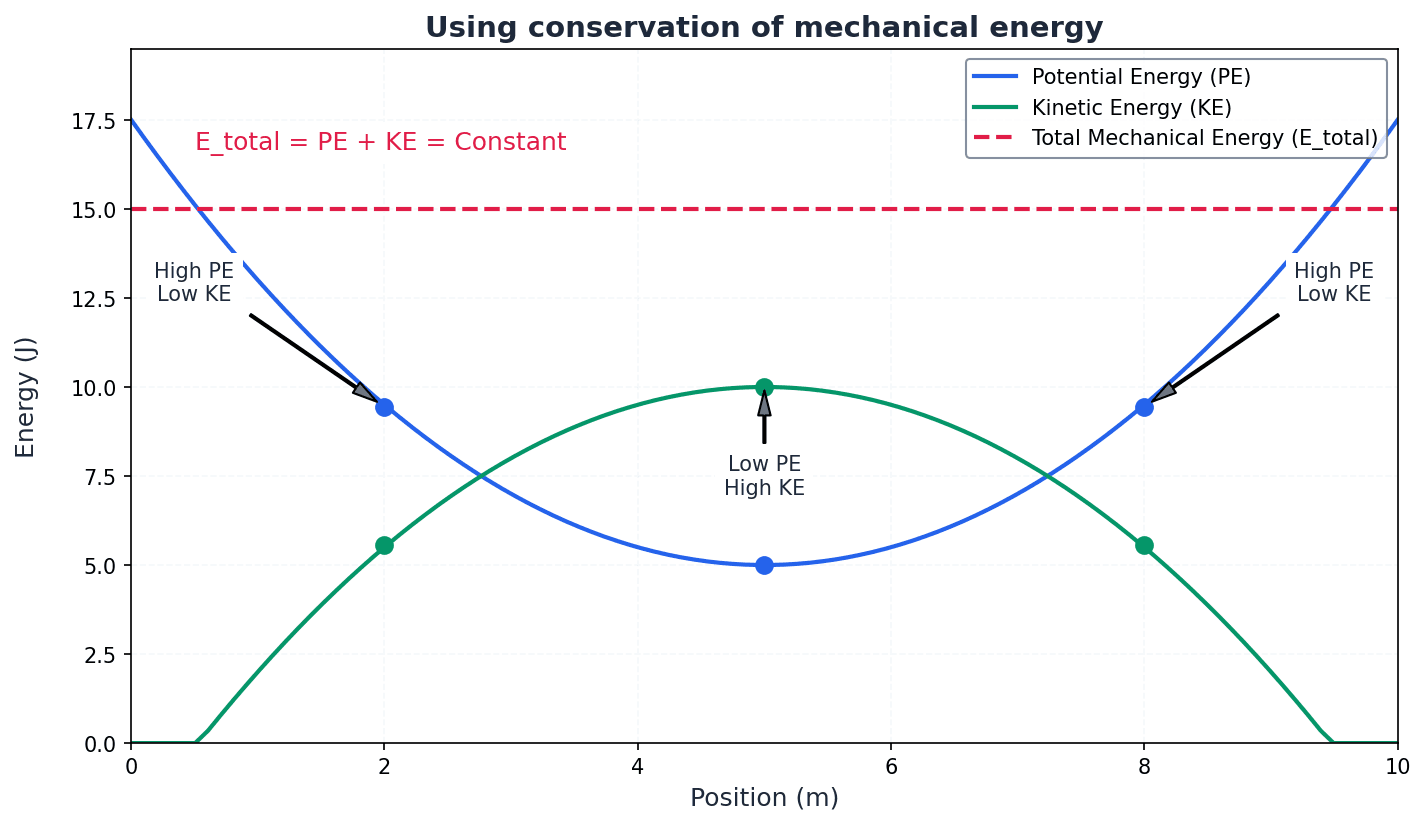
When only conservative forces are doing work, you can directly equate initial and final total mechanical energy (K.E. + P.E.) to simplify problem-solving.
Choose your method wisely: Use 'Conservation of Energy' (KE₁ + PE₁ = KE₂ + PE₂) only when there are no dissipative or external driving forces. Use the 'Work-Energy Principle' when friction, air resistance, or a driving force is present.
For Work-Energy problems, always draw a free-body diagram first. Calculate the work done by each individual force (positive, negative, or zero) before summing them to find W_total.
When using P = Fv, remember 'F' is the driving force from the engine/motor, NOT the net force on the object. If a vehicle is moving at constant speed, the driving force equals the resistive forces.
Exam Technique
Work-Energy Principle (with dissipative/driving forces)
Conservation of Mechanical Energy (only conservative forces)
| Mistake | Fix |
|---|---|
| Confusing kinetic energy (scalar) with momentum (vector). | Remember K.E. = ½mv² is a scalar quantity, only having magnitude. Momentum p = mv is a vector, having both magnitude and direction. |
| Assuming any force exerted results in work done. | Work is only done if there is movement in the direction of the force. A force perpendicular to the direction of motion does zero work. |
| Forgetting to include all forces (e.g., friction, weight component) when applying the work-energy principle. | Always draw a free-body diagram and calculate the work done by *every* force acting on the body to find W_total. |
Generated by Nexelia Academy · nexeliaacademy.com